Вибрационные машины и принцип их действия: Вибрационные машины
Вибрационные машины
Категория:
Машины для уплотнения грунтов 2
Публикация:
Вибрационные машины
Читать далее:
Вибрационные машины
Машины этого класса воздействуют на грунт вибрацией, т. е. частыми колебаниями с малой амплитудой и значительным ускорением, достаточным для перемещения частиц грунта в наиболее устойчивое положение. Возбудителем этих колебаний является вибратор (один или несколько), который, будучи смонтирован в корпусе машины, способен вызывать колебания ее рабочего органа — плиты, колеса, вальца и т. п.
На вибрационных машинах, предназначенных для уплотнения грунта, наиболее широкое распространение получили механические вибраторы эксцентрикового типа, у которых возмущающей силой является центробежная сила энерции. Под возмущающей силой понимается сумма вертикальных слагающих центробежных сил инерции, развивающихся при вращении неуравновешенных масс (дебалансов), укрепленных на валу вибраторов.
Кинетическая энергия, передаваемая вибратором, приводит в колебательное движение частицы грунта, расположенные в зоне действия вибратора. В колеблющихся частицах возникают силы инерции, прямо пропорциональные их массам. При достаточно большой разности сил инерции частиц связь между ними нарушается, происходит отрыв частиц друг от друга, их относительное перемещение. При этом мелкие частицы, перемещаясь, заполняют пустоты между крупными зернами, увеличивая тем самым плотность грунта и равномерность его уплотнения по глубине слоя. Теоретически наибольший эффект уплотнения грунта вибрацией достигается при работе вибрационной машины в резонансе с грунтом.
Рекламные предложения на основе ваших интересов:
Уплотнение грунтов вибрацией будет происходить тем интенсивнее, чем больше будет разница в размерах их частиц и чем меньше будут силы связей между ними. Поэтому эффективно уплотняются вибрированием несвязные песчаные и галечнико-вые грунты, а также гравий и щебень, содержащие в своем составе частицы различной крупности со слабыми связями между ними.
Вибрационные машины классифицируют по способу их перемещения во время работы и по характеру действия возмущающей силы.
По способу перемещения различают прицепные вибрационные машины, самоходные и переносные. По характеру действия возмущающей силы различают вибрационные машины: а) с направленными колебаниями, у которых возмущающая сила имеет постоянное направление и переменную величину, и б) с круговыми колебаниями, у которых возмущающая сила имеет постоянную величину и переменное направление.
В виброуплотняющих машинах применяют дебалансные вибраторы с направленными или круговыми колебаниями (рис. 157). Вибраторы с круговыми колебаниями конструктивно проще вибраторов с направленными колебаниями, но в полезной работе такого вибратора участвует лишь вертикальная составляющая возмущающей силы. Вместе с тем, как показывает практика, вибраторы с направленными колебаниями по сравненнию с вибраторами, имеющими круговые колебания, не увеличивают эффект уплотнения.
Для поверхностного уплотнения грунтов наиболее широкое распространение получили вибрационные катки с гладкими вальцами (реже пневмоколесные) и самопередвигающиеся; вибрационные плиты — глубинные виброуплотнители для уплотнения грунтов в слоях мощностью несколько метров.
Вибрационные катки по способу перемещения разделяют на самоходные и прицепные. Эффективность вибрационных катков по глубине и степени уплотнения грунтов превышает эффективность катков статического действия в 8—10 раз. В связи с этим вибрационные катки получили большое распространение в ряде стран.
Выпускаемые катки имеют большой диапазон применяемых частот (1000—4500 колебаний в минуту) и амплитуд колебаний.
Вибрационные катки создавались на базе катков статического действия, поэтому по внешнему виду, компоновке и конструктивному решению ряда узлов виброкатки имеют много общего с катками с гладкими вальцами. Специфической особенностью всех виброкатков является наличие вибратора и системы подвески рамы к вибровальцу. В большинстве случаев в вибрационных катках применяют дебалансные вибраторы с круговыми колебаниями, которые обычно монтируются внутри вальца.
Рис. 157. Схемы вибраторов:
а — направленного действия; б — ненаправленного действия; 1 – дебаланс; 2 — корпус; 3 — вал
Вибратор работает при большом числе оборотов, поэтому привод дебалансного вала осуществляется через клиноременную передачу. В трансмиссии от двигателя к вибратору обязательно применяется муфта, предназначенная для включения и выключения вибратора в процессе работы катка.
Для подбора оптимального режима в конкретных условиях работы «а вибрационных катках предусматривается возможность изменения частоты вибрации на 15—20% за счет регулирования числа оборотов двигателя или изменения передаточного отношения в трансмиссии (вариатор, коробка перемены передач). Большое внимание уделяется также предотвращению передачи вибрации рабочего органа раме, на которой находится моторист и установлены двигатель и трансмиссия. В этой связи важную роль играет подвеска рамы к вибровальцу. Виброизоляция рамы катка обеспечивается резино-металлическими амортизаторами, а также применением подвесок на пневморезиновых, пружинных и рессорных амортизаторах.
Самоходные вибрационные катки по способу управления подразделяются на катки, управляемые дышлом, и катки, управляемые направляющим вальцом. Катки, управляемые дышлом, могут быть одновальцовыми (с поддерживающим роликом и без него) и двухвальцовыми, а катки, управляемые направляющим вальцом, — двухвальцовыми и трехвальцовыми (двухосными и трехосными).
Самоходные катки, управляемые дышлом, в основном представляют собой легкие катки массой обычно 125—700 и реже 1000—2000 кг. Легкие катки имеют небольшие габариты и обладают высокой маневренностью. Их применяют на работах небольшого объема, а также для уплотнения грунта в стесненных условиях. Двигатель и трансмиссия однавальцовых легких виброкатков располагаются над вальцом. При этом развеска рамы с двигателем и трансмиссией производится с таким расчетом, чтобы центр их тяжести находился на одной вертикали с осью вальца. Рычаги управления трансмиссией на легких катках располагаются непосредственно на раме катка, а на более тяжелых выносятся с помощью тяг на дышло.
Легкие одновальцовые виброкатки для предотвращения опрокидывания на стоянках снабжают опорными ножками. Тяжелые катки для этой же цели оборудуют специальным поддерживающим вальцом небольшого размера либо колесом с шиной, прикрепляемыми к дышлу катка.
Самоходные катки, управляемые направляющим вальцом, имеют массу в пределах 500—16 000 кг. По внешнему виду и компоновке узлов эти катки не отличаются от катков статического действия. Часто для этой цели на тяжелый трехвальцовый трехосный каток статического действия с двумя управляемыми вальцами вместо среднего статического вальца устанавливают вибровалец.
Прицепные вибрационные катки имеют массу в пределах 1500—12 000 кг с частотой колебаний вибратора 1000—3600 в минуту. Различают прицепные виброкатки с индивидуальным двигателем для привода вибрационного механизма и с отбором мощности тягового трактора.
Прицепной виброкаток с индивидуальным двигателем (рис. 158, а) массой 3000 кг представляет собой валец, внутри которого встроен дебалансный вибратор. На вальце через амортизирующую подвеску укреплена жесткая рама с дышлом со сцепным устройством, при помощи которого каток прицепляется к буксирующему трактору. Для привода вибратора на раме Установлен двигатель (обычно дизель), который передает вращение вала вибратору клиноременной передачей. Двигатель с трансмиссией помещаются на раме над вальцом или позади вальца. В последнем случае для балансировки рамы катка на дышле укрепляется противовес. Для облегчения поворота катка валец часто выполняется разрезным (в виде двух барабанов).
Некоторые конструкции виброкатков приспособлены для работы на откосах каналов с уклоном до 45°. Такие катки перемещаются при помощи лебедки экскаватора или стрелового крана, которые передвигаются по верхней кромке откоса.
Поскольку для перемещения виброкатка не требуется большого тягового усилия, целесообразно применять сцепы из нескольких катков с одним трактором, добиваясь полного уплотнения за один проход.
Рис. 158. Приаепной вибрационный каток
Опытом эксплуатации установлено, что для уплотнения внбро-катками насыпей и, обратных засыпок в земляных сооружениях необходимо бульдозерами разравнивать грунт ровными слоями толщиной от 0,5 до 11,5 м. В летних условиях грунты, подлежащие уплотнению виброкатками, увлажняют поливом 100—150 мъ воды на 1000 ж3 грунта. Зимой грунт укатывают немедленно, не допуская его промерзания.
Типажем на новые машины предусматривается серийный выпуск виброкатков массой от 3 до 1,2 т с возмущающей силой, равной соответственно 8—10 -ь 35—40 тс. Для гидротехнического строительства предусматривается изготовление катков массой до 24 т с возмущающей силой соответственно до 70 тс и производительностью от 200 до 4000 ж3/ч.
Вибрационные плиты применяют для уплотнения слабосвязных и несвязных грунтов, отсыпаемых слоями толщиной 1,2— 1,5 м. Плиты изготовляют самопередвигающимися, прицепными, крановыми и ручными.
Вибрационная плита (рис. 159) состоит из вибрирующей (ударной) и подрессорной частей. Вибрирующая часть — плита, являющаяся рабочим органом машины, представляет собой жесткую сварную конструкцию, в средней части которой устанавливаются два вибратора. Возмущающая сила вибраторов может быть направлена строго вертикально или под углом к вертикали для самопередвижения виброплиты.
Рис. 159. Вибрационная плита:
1 — плита литая; 2 — пружинная подвеска; 3 — шкив; 4 — двигатель; 5 — рама; 6 — аккумулятор; 7 — бак для топлива; £ — кабестан; 9 — вибратор; 10 — звездочка натяжная; 11 — привод кабестана
Над плитой на амортизирующих устройствах подвешивается рама с двигателем, трансмиссией и механизмами управления. Вращение шкиву вибратора передается шкивом трансмиссии. В передней части плиты может быть укреплен кабестан, служащий для самовытаскивания машины при помощи каната, закрепляемого к грунтовому якорю. С обеих сторон плита имеет буксирные тяги для работы челночным способом в прицепе с тягачами.
Виброплиты тяжелого типа массой 5—7 т с большими удельными динамическими нагрузками на поверхность уплотняемого грунта могут быть использованы и для уплотнения связных грунтов. Глубина уплотнения виброплитами определяется мощностью вибраторов и величиной возмущающей силы. С помощью мощных виброплит оказалось возможным уплотнение галечии-ковых грунтов на глубину до 2 м.
Ценным качеством виброплит является то, что они могут передвигаться под воздействием возмущающей силы. При малых габаритных размерах и обычно небольшом их весе виброплиты можно использовать для уплотнения грунтов на площадях малых размеров и на объектах с небольшими объемами работ, а также в условиях, где невозможно или нерационально использование машин других типов.
Наряду с тяжелыми вибрационными плитами, перемещаемыми трактором или переставляемыми краном, в последнее время создано много различных типов самоходных и навесных многосекционных виброуплотнителей. Рабочим органом последних является несколько виброплит, подвешенных к раме гусеничного или колесного тягача.
Типажем на новые машины предусматривается серийный выпуск самолередвигающихся виброплит массой от 125 до 6000 кг с возмущающей силой от 0,9 до 25 тс.
Глубинные виброуплотнители
Для уплотнения несвязных грунтов на всю глубину слоя, подлежащего уплотнению, применяют глубинные виброуплотнители, работающие гидровибрационным методом. При этом методе уплотнения отпадает необходимость в послойном уплотнении грунта в насыпях и обратных засыпках, что позволяет уменьшить сроки выполнения и стоимость работ.
Гидровиброуплотнители применяют и для подводного уплотнения песчаных грунтов. До сих пор для такого уплотнения не было никаких механизмов.,
Принцип гидровибрационного метода заключается в сочетании работы водной струи, действующей под давлением, с вибрацией. Впервые этот метод был предложен в 1935 г. в Германии, а с 1947 г. получил применение в США и Англии под названием метода виброфлотации для уплотнения песчаных грунтов на глубину 5—15 м. Гидровибрационная установка состоит из глубинного гидровибратора, подвешенного к крюку самоходного стрелового крана, и передвижной электростанции (при отсутствии централизованного электроснабжения).
Принципиальная конструктивная схема гидровибратора приведена на рис. 160. Он состоит из корпуса и штанги, соединенных между собой через прокладку. В корпусе вибратора помещен электродвигатель, вал ротора которого соединен при помощи муфты с валом вибратора, имеющим неуравновешан-ный груз — дебаланс. Штанга во время работы гидравибратора практически не участвует в передаче колебаний; ее длина назначается исходя из намечаемой глубины уплотнения. Вода к гидровибратору подается при помощи гибких шлангов от насосной установки с оптимальным давлением 600—800 кн/м2 (6—8 ат). К соплам вибратора вода подается по каналам (путь воды показан стрелками).
Уплотнение грунта при помощи гидровибрационных установок производится путем последовательного погружения и извлечения гидровибратора в различных точках.
Каждый отдельный цикл работы гидровибрационной установки состоит из следующих последовательных операций:
1. Гидровибратор устанавливается при помощи самоходного крана вертикально над местом погружения, включается его электродвигатель, и подается вода через нижнее сопло.
2. Производится погружение гидровибратора в грунт под действием собственного веса на требуемую глубину уплотнения. Скорость погружения зависит от веса гидровибратора, начальной плотности и гранулометрического состава грунта и обычно составляет 1—2 м/мин. Во время погружения происходит предварительное уплотнение и образование воронки.
3. При достижении требуемой глубины погружения поток воды переключается на верхние сопла, а подача воды через нижнее сопло прекращается. Образовавшаяся вокруг гидровибратора воронка засыпается песком при помощи бульдозера или лопат.
4. Производится извлечение гидровибратора с остановками через каждые 30— 40 см при продолжающейся подаче воды через верхние сопла. Во время извлечения по мере осаДки грунта производится его подсыпка.
Рис. 160. Гидравлический вибратор
После каждого цикла работы гидровибратора образуется столб уплотненного грунта диаметром 3—5 м и глубиной, равной глубине погружения. Расположение точек погружения на площади уплотняемого массива грунта и расстояния между точками устанавливаются расчетом в зависимости от необходимой плотности основания.
Опыт эксплуатации экспериментальных образцов глубинных виброуплотнителей в различных производственных условиях показал, что необходимы виброуплоткители следующих типов:
а) легкий — для уплотнения слоев грунта толщиной до 1,5 м;
б) средний — для уплотнения слоев от 1,5 до 4 ж и в) тяжелый — для уплотнения слоев от 3 до 10 м.
По конструкции виброуплотнители всех типоразмеров одинаковы и представляют собой комплект секций, соединенных в штангу. Нижняя головная секция — гидровибратор имеет вибромеханизм и систему отверстий для нагнетания воды в грунт, а остальные секции штанги являются сменными; количество этих унифицированных секций зависит от глубины уплотнения грунта.
Типажем на новые машины предусматривается выпуск глубинных виброуплотнителей мощностью от 4,5 до 14 кет с номинальной глубиной уплотнения грунта соответственно от 1,5 до 10 м.
В настоящее время ведутся работы по усовершенствованию конструкций машин для уплотнения грунта, а также изысканию новых принципиальных схем их работы. Заслуживают, в частности, внимания комбинированные способы уплотнения грунтов, например, вибрирование с трамбованием. Возможно также создание трамбующих машин не со свободным, а с принудительным падением рабочих органов и вибрационных машин с высокими частотами колебаний.
Рекламные предложения:
Читать далее: Пневматические бурильные молотки
Категория: —
Машины для уплотнения грунтов 2
Главная → Справочник → Статьи → Форум
ВИБРАЦИОННЫЕ МАШИНЫ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | Станки для шлакоблоков
Описанные в разделах 6—13 вибрационные машины относятся к наиболее распространенным направлениям применения вибрационной техники в строительстве и производстве строительных материалов, но далеко не охватывают все направления и все типы применяемых вибрационных машин. Остановимся коротко еще на некоторых применениях вибрационной техники в основных и вспомогательных операциях.
Проблема разгрузки смерзшихся сыпучих материалов из полувагонов имеет в условиях нашей страны очень большое значение, учитывая громадный масштаб перевозок таких грузов, в том числе песка, гравия, щебня, керамзита и других материалов для строительства и производства строительных материалов. Среди предложенных способов механизации разгрузки полувагонов со смерзшимися материалами вибрационный способ продемонстрировал ряд положительных сторон: повышение скорости разгрузки, малую стоимость, возможность работы без причинения ущерба подвижному составу и др. Поэтому были разработаны вибрационные разгрузчики различных конструкций.
Показанный на рис. 98, а вибрационный разгрузчик состоит из дебалансного двухвального вибровозбудителя, вызывающего вертикально направленные колебания плиты с рыхлящими штырями. Машину при помощи виброизолирующей подвески присоединяют к крюку крана, который ставит ее на поверхность подлежащего разгрузке материала. После открытия люков полувагона включают вибровозбудитель и штыри под действием веса машины погружаются в смерзшийся материал, вызывая его растрескивание, дробление и обрушение в люки. После разгрузки одного участка полувагона машину переставляют на следующий участок. Виброразгрузчик обеспечивает производительность 60—120 т/ч. Мощность его двух встроенных асинхронных электродвигателей составляет 40 кВт, амплитуда вынуждающей силы 200 кН, масса машины 5 т.
Существует ряд вибрационных установок для выгрузки сыпучих грузов из крытых вагонов. Одна из них показана на рис. 98, б. Вагон подают на рельсы платформы 1 и жестко скрепляют с нею двумя упорами 5. После снятия замков с рельсовыми вставками 6 платформу наклоняют на 10° в сторону разгрузки. Платформа опирается на рычаги 2 и пружины 3, установленные в опорах 4. Включают дебалансный вибровозбудитель 7, и сыпучий груз устремля
ется к открытой двери посередине вагона. Вибровозбудитель развивает вынуждающую силу, направленную вдоль вагона, а система рычагов заставляет вагон покачиваться при колебаниях.
Имеется ряд конструкций вибрационных дробилок. На рис. 99, а показана конусная вибрационная дробилка, предназначенная для дробления материалов до крупности 3-=-5 мм, что позволяет ис
пользовать ее в качестве источника питания мельниц. Дробилка состоит из корпуса с чашей 7, дробящего конуса 8 и дебаланса 9, который приводится во вращение электродвигателем 1 через вал со шлицевым соединением 4 и карданными шарнирами 10. Вал 6 опирается на два подшипника. Конус сочленен с корпусом при помощи сферического шарнира 5. Корпус подвешен к несущей раме 3 при помощи тяг 11 и пружин 2. Под действием вращающегося дебаланса дробящий конус обкатывается по внутренней поверхности чаши, дробя при этом находящийся в зазоре материал. Такие дробилки были выпущены с диаметром дробящего конуса (максимальным) 0,21; 0,6 и 1,65 м и соответствующей производительностью
1,2; 30 и 250 т/ч.
Одна из конструктивных схем ударно-вибрационной щековой дробилки изображена на рис. 99, б. Здесь две массивные щеки 1, совершающие прямолинейные антифазные колебания, соединены с опорной рамой 4 упругими элементами 3. Колебания щек возбуждаются расположенными в них двухвальными дебаланс — ными вибровозбудителями 5. Вращение дебалан — сов осуществляется от электродвигателей 8 через синхронизирующую зубчатую передачу 7 и карданные валы 6. Между опорной рамой и платформой 9 установлены виброизоляторы 10. Дробление осуществляется ударами щек о куски материала, расположенные между ними. Эта система практически уравновешена. Поскольку между щеками нет жесткой кинематической связи, можно дробить материал, содержащий недробимые (например, стальные) куски, которые раздвигают щеки и проходят, не вызывая поломки машины.
Вибрационные мельницы (рис. 100) предназначены для тонкого и сверхтонкого помола различных материалов, в том числе для помола и активации цемента и других вяжущих материалов. Схема вибромельницы с круговыми колебаниями приведена на рис. 100, а. Вал одновального дебалансного вибровозбудителя 4 опирается на подшипники 6, установленные в трубе, которая концентрично расположена в цилиндрическом корпусе 3. Вращение де-
балансному валу передается от электродвигателя 1 через муфту 2. Корпус опирается на виброизоляторы 7. Под влиянием круговой вибрации корпуса мелющие тела 5 и частицы измельчаемого материала совершают хаотические движения, трутся друг о друга и соударяются многократно. Помимо этого хаотического движения вся загрузка совершает сравнительно медленное циркуляционное движение. Общий вид машины приведен на рис. 100,6. Такие машины имеют объем корпуса от 0,01 до 1 м3, статический момент массы дебалансов от 0,1 до 5,6 кг-м, мощность двигателя от 4,5 до 75 кВт, массу (без мелющих тел) от 0,18 до 2,9 т, частоту 1500 или 3000 кол/мин, амплитуду от 1,5 до 4 мм.
Для прокладки различных коммуникаций под насыпями, сооружениями, холмами без проходки туннелей или рытья траншей в ряде случаев используют вибропрокалывающие и вибропродавливающие агрегаты. В них применяют специальные вибропогружатели и вибромолоты. Различные схемы таких машин изображены на рис. 101. Эти схемы относятся к безударному вибрационному проколу. Но по схемам рис. 101, б—г может осуществляться ударно-вибрационное продавливание. На схемах рис. 101, a—в показаны прокалывающая труба I, которая непосредственно или через промежуточные элементы связана с наконечником 2, и вибровозбудитель направленного действия 3. На рис. 101, а вибровозбудитель жестко прикреплен к торцу трубы, а прокалывающее усилие передается через пружины 4 на трубу и жестко соединенный с нею наконечник. На рис. 101, б вибрация передается наконечнику через штангу, проходящую внутри трубы, а пригружающее усилие, прикладываемое к торцу трубы, передается наконечнику через пружины 4. На рис. 101, в вибровозбудитель встроен в наконечник, а пригружающее усилие передается так же, как в предыдущем случае.
На рис. 101, г установка включает направляющую раму 1, тележку 2, вибровозбудитель 3 направленного действия, лебедку 4, создающую прокалывающее усилие с помощью каната, который соединен с тележкой и направляющей рамой полиспастом 5. Вибровозбудитель подвешен к тележке на пружинах 6 и опирается на ролики 8. Дебалансные валы приводятся во вращение от электродвигателя 7 через клиноременную передачу. В вибровозбудителе имеется отверстие, через которое проходит прокалывающая труба. Вибровозбудитель может закрепляться в любом месте трубы.
В течение ряда последних лет уделяется внимание разработке землеройных машин с ударно-вибрационными рабочими органами. Такие машины предназначают для разработки грунтов, трещиноватых скальных пород и в других трудных случаях, когда обычные землеройные машины можно применять только после предварительного рыхления или оттаивания.
При инженерно-геологических изысканиях применяют наряду с другими методами вибрационное бурение грунтов, при котором буровой инструмент внедряется в грунт вибропогружателем или вибромолотом, причем основная задача бурения заключается в том, чтобы из толщи грунта извлечь столбик породы с ненарушенным природным сложением. Эта задача удовлетворительно решается вибрационным бурением, которое отличается высокой производительностью и низкой стоимостью работ.
В некоторых случаях при строительстве массивных бетонных сооружений и при наличии на месте дешевого крупноразмерного камня применяют так называемый камнебетон, что уменьшает расход бетонной смеси на 30-=-40%. Для уплотнения камнебетона путем послойного вдавливания камней в бетонную смесь может применяться вибрационная машина, которую в иностранной литературе иногда называют мамонтом (рис. 102). Машина состоит из вибровозбудителя, который по своей конструкции подобен деба- лансному глубинному вибровозбудителю, но содержит три соосно расположенных виброблока, пристроенного сверху электродвигателя, расположенной внизу решетчатой плиты, которая контактирует с погружаемыми в бетонную смесь камнями, кольцевых грузов, подвешенных к верхней части корпуса, где амплитуда колебаний минимальна, и канатной подвески, при помощи которой машину присоединяют к крюку крана. Частота вибрации машины близка к 3000 кол/мин, вынуждающая сила вибровозбудителя 180 кН, мощность двигателя 40 кВт, масса машины без грузов около 3 т, с грузами 15 т, размер опорной решетчатой плиты 1,8×1,8 м. Размеры погружаемых камней 0,15—0,4 м, производительность машины 80—100 м3/ч.
Для прикатывания линолеума после укладки его на мастике применяют ручные виброкатки (рис. 103). Они обеспечивают прочное сцепление линолеума с основанием пола. Машина содержит два прикатывающих вальца, собранных в раме, на которую установлен маятниковый дебалансный вибровозбудитель. К раме прикреплена рукоятка с выключателем. При ширине вальцов от 0,3 до 0,45 м виброкатки обеспечивают производительность от 75 до 150 м2/ч.
В рамках данной книги нет возможности охватить всю номенклатуру вибрационных машин и процессов, используемых в строительстве и производстве строительных материалов. Невозможно также даже коротко остановиться на важнейших применениях вибрационных машин в других областях. Между тем пределы возможностей вибрационной техники весьма широки. Практически все отрасли промышленности и сельское хозяйство, строительство и транспорт, медицина и коммунальное хозяйство, научные лаборатории и испытательные станции — вот та сфера, в которой разумное и целенаправленное использование вибрационной техники приносит значительную, а в дальнейшем принесет еще большую пользу.
Огромны диапазоны размеров, массы, мощности вибрационных устройств: от сотен киловатт крупного вибропогружателя до долей ватта маленького зуммера, от внушительного вибрационного корабля-ледокола до крошечного зубоврачебного бура.
Перечислим бегло еще некоторые применения вибрационных машин и устройств. Вибрирование грунтозаборных органов землесосных снарядов или вибрирование специальными устройствами грунта вблизи всаса грунтозаборных органов нередко имеет существенные преимущества перед фрезерным рыхлением и обеспечивает значительное повышение производительности землесосных снарядов и расширение области их применения. Разработаны методы и устройства для вибрационного заполнения емкостей сыпучими материалами, поступающими снизу. Такой процесс получил наименование вибробункеризации. Разработаны вибрационные процессы и машины для отмывки нерудных и рудных материалов от глинистых включений. Их характеризуют высокая производительность, хорошее качество отмывки и низкий расход воды.
Большое распространение получила вибрационная техника в технологии машиностроения и приборостроения. Широко применяются вибрационные накопители и вибрационные бункеры для питания автоматических станков и автоматических линий штучными заготовками, причем во многих случаях осуществляется точная пространственная ориентация подаваемых деталей. Вибрационные бункеры находят применение также в радиоэлектронной, фармацевтической и других отраслях промышленности. Быстро внедряются операции вибрационной обработки деталей, начиная от галтовки до точных доводочных операций — хонингования, полирования и т. д. Вибрация находит применение при точении, фрезеровании, сверлении, строгании.
Широко применяются вибрационно-прессовые и ударно-вибрационно-прессовые машины для изготовления литейных форм и стержней. В ряде случаев производится вибрирование расплавленного металла в ковшах перед заливкой и в изложницах при кристаллизации. Это приводит к более совершенному удалению газов и шлаковых включений из металла и получению равномерной тонкозернистой структуры слитков. На многих предприятиях имеются вибрационные решетки для выбивки опок. Вибрационные и ударно-вибрационные стенды используются для быстрого искусственного старения отливок и поковок. Это в сотни раз ускоряет процессы старения, т. е. снятия внутренних напряжений во избежание последующих деформаций. К тому же снятие напряжений происходит гораздо полней, чем при естественном старении. Ведутся работы по закалке металлических деталей в виброкипящем слое сыпучего материала. Все шире применяют вибрацию при прессовании изделий из порошковых и зернистых материалов и при обработке давлением металлов, пластмасс и других материалов.
Большие перспективы имеют вибрационные процессы в химической, металлургической, пищевой, текстильной, кожевенной, меховой и других отраслях промышленности. Важнейшими направлениями здесь надо считать применение вибрации для интенсификации процессов, протекающих в жидкой среде, в особенности на границах двух фаз, например, выщелачивания, экстракции, растворения, обезжиривания, дубления, окраски. Перспективны также многочисленные процессы, ускоренно протекающие в сухом виброкипящем слое или в зоне вибрационного псевдоожижения.
Значительное применение в горной, обогатительной, металлургической и химической промышленности имеют вибрационные машины для транспортирования и сепарации материалов, а также на погрузочно-разгрузочных и вспомогательных операциях. Большую и традиционную область применения имеют вибрационные машины в зерновой и мукомольной промышленности.
В заключение назовем еще такие две различные сферы применения вибрационных процессов, как механизированная уборка урожая орехов и фруктов при помощи вибрационных устройств и вибрационный медицинский массаж.
Вибрационные машины и принцип их действия
В группе 11 приводятся механизмы виброметров и вибрографов с маятниковыми подвесами (приборы сейсмического типа). Данный тип приборов находит себе частое применение при испытании вибрационных явлений в машинах. Принцип действия приборов основан на предположении покоя инертной массы (или ее определенной точки) и относительном перемещении остальных частей вместе с испытуемым телом (звеньями).
[c.18]
ВИБРАЦИОННЫЕ МАШИНЫ И ПРИНЦИП ИХ ДЕЙСТВИЯ 301
[c.301]
Новый тип машин, где вибрации играют полезную роль, носит название машин вибрационного принципа действия. Они получили широкое применение в последние годы в самых различных отраслях техники благодаря экономичности, обусловленной использованием эффекта резонанса. Машины, приборы, оборудование и стенды [c.15]
Принципы действия, конструктивные схемы, диапазоны параметров, рекомендации по выбору принципиальных схем и установлению основных параметров вибрационных машин, а также вопросы автоматизации ударно-вибрационных и резонансных машин рассмотрены в четвертой части [c.12]
По принципу действия машины для уплотнения можно разделить на статические, трамбующие, вибрационные и комбинированные. [c.92]
Машины для свайных работ (рис. 10) разбиваются по принципу действия на три группы ударного действия, вибрационного действия и вдавливающего действия. [c.11]
Вибрационные конвейеры, получающие все большее применение как технологические и транспортирующие машины, являются дальнейшим развитием ранних типов транспортирующих машин с возвратно-поступательным движением желоба (фиг. 133), принцип действия которых заключается в том, что при ускорении желоба груз удерживается на нем трением и, двигаясь-совместно с ним, приобретает некоторую скорость при замедлении желоба груз но инерции проскальзывает по нему, расходуя запасенную кинетическую энергию на преодоление сопротивлений движению (трение, составляющая веса в наклонном конвейере). Для перемещения груза в одном направлении необходимо, чтобы сила трения материала о желоб или ускорение желоба, нри ходе вперед и назад были неодинаковыми. [c.206]
В учебнике рассмотрены основные типы транспортирующих машин непрерывного действия конвейеры, эскалаторы, элеваторы, пневматические и гидравлические транспортирующие устройства, а также вспомогательные устройства транспортирующих систем и основные типы погрузочных машин. Изложена общая теория транспортирующих машин непрерывного действия. Вводные сведения по транспортирующим машинам содержат их классификацию, основы технико-экономиче-ских расчетов, вопросы выбора машин, основные направления их современного развития, характеристику транспортируемых грузов. Описание транспортирующих машин включает общее устройство, принципы действия, современные конструкции машин и их элементов, области применения, теорию, основные параметры, способы расчета (с примерными расчетами) и эксплуатационные характеристики. Главное внимание уделено конвейерам рассмотрены ленточные, пластинчатые, скребковые, скребково-ковшовые, ковшовые, люлечные, подвесные, грузоведущие, качающиеся, винтовые и роликовые конвейеры. Более подробно рассмотрены новые разновидности конвейеров, получающие в настоящее время широкое развитие, — подвесные толкающие с автоматическим адресованием, специальные скребковые, вибрационные, шагающие и напольные тележечные. [c.2]
В дорожном строительстве все шире используют машины для уплотнения грунтов, оснований и покрытий, работающие на принципе вибрационного и ударного действия. Осваиваются само-передвигающиеся виброплиты весом до 6 /п, грунтоуплотняющие машины ударного действия с энергией удара до 1500 кГ-м, самоходные кулачковые катки весом 25—30 и 45—50 от, самоходные пневмокатки весом 45 т, трамбовки различного веса, виброкатки
[c.4]
Задачи расчета параметров вибрационных машин довольно разнообразны. Большая часть нх специфична она определена особенностями технологического процесса, выполняемого машиной, видом используемого вибропривода, конструктивными особенностями машины. Некоторые из этих задач представлены в последующих главах о вибровозбудителях различного принципа действия и вибрационных машинах разного назначения. Другая значительная часть задач, требующих рассмотрения вибрационной машины как колеблющейся системы, может быть решена путем непосредстр.енного использования методик расчета и формул, приведенных в томах [c.152]
Ряд процессов осуществляют с помощью ручных и стационарных вибромолотов, вибротромбовочных установок, вибросит и др. В последнее время ударно-ви-брациониый принцип действия применяют в ряде технологических процессов для их интенсификации (например, уплотнение бетона). Расчет этих машин существенно отличается от расчета других вибромашин. После выбора схемы вибрационной машины (см. гл. V) задачами расчета являются 1) выбор параметров схемы, обеспечивающих необходимую (паилучшую) кинематику, т. е. скорость, частоту и другие кинематические показатели ударного узла 2) определение сил и соответствующих напряжений. [c.165]
В вибровозбудителях фирмы Линк-Белт (США) вращательное движение приводного вала электродвигателя насоса преобразуется в возвратно-поступательное движение штока. Частоту колебаний можно регулировать изменением скорости вращения приводного электродвигателя, амплитуду колебаний — специальным регулировочным клапаном. Вибровозбудитель имеет корпус, внутри которого помещен эксцентрик, приводимый во вращение электродвигателем через клиноременную передачу и шкив Возникающая при вращении эксцентрика пульсация находящегося в корпусе масла заставляет поршень совершать возвратно-поступательное движение. Это движение штоком с цапфой передается через упругую систему рабочему органу вибрационной машины. В конвейерах с принудительным виброприводом шток прикреплен непосредственно к рабочему органу. Корпус закрыт крышкой. Устройство и принцип действия этого вибровозбудителя поясняет рис. 6. Эксцентрик 2 вращается валом 3 в полости 6 корпуса вибровозбудителя /, заполненной маслом. Для устранения утечки масла из одной половины полости в другую к эксцентрику прижи- [c.291]
По характеру сил взаимодействия исполнительною органа с уплотняемой средой уплотняющие машины можно разделить на машины статического действия (прессующие, укатывающие) и динамического действия (безударные вибрационные, ударно-вибрацнонные, ударные). В принципе одна и та же вибрационная машина для уплотнения грунта могла бы работать либо в безударном вибрационном режиме, либо в ударно-вибрационном, что зависит от статического момента массы и угловой скорости дебалансов, массы машины, состава и свойств (в том числе степени уплотненности) грунта. Однако при проектировании назначают параметры машины, обеспечивающие ее эффективную работу в определенном режиме. [c.358]
Принцип действия вибрационных полотеров состоит в том, что щеткам сообщают поступательную круговую вибрацию в горизонтальной i/лоскосгн с амплитудой перемещения до 15 мм и частотой до 25 Гц. Вибрирующие щетки делают более жесткими в тангенциальном направлении, чем вращающиеся. Достоинствами этих машин являются равномерный и замедленный износ щеток, хорошее качество натирки, возможность использования щеток прямоугольной формы, что обеспечивает проработку углов. [c.414]
Машины непрерывного действия перемещают грузы потоком горизонтально, вертикально или наклонно. Они получили название транспортирующих машин. К ним относятся конвейеры и элеваторы, а также установки гидравлического и пневматического транспорта. Конвейеры бывают с тяговым рабочим органом (ленточные, пластинчатые и скребковые конвейеры) и без него (винтовые, инерционные, вибрационные, роликовые и шагающие конвейеры). Элеваторы делятся на ковшовые, полочные и люлечные. Пневматические установки в зависимости от принципа действия разделяют на всасывающие (вакуумные), нагнетательные и комбинированные. Гидротранспортирующие установки и трубопроводный транспорт служат для перегрузки и транспортирования жидких или в смеси с жидкостью различных насыпных грузов. [c.39]
Для очистки вагонов разработаны машины и устройства, заменяющие ручной труд на этих работах. По принципу действия они классифицируются на щеточные (воздействуют на остатки груза цилиндрическими, дисковыми, плоскими и другими видами щеток), скребковые (сталкивают остатки грузов скребками разной формы, стругами, ножами и т. п.), вибрационные (вызывают подвижность или текучесть статков груза и их удаление под действием вибрации) — накладные вибраторы, люковибраторы, боковые, продольные и другие виды вибраторов, пневматические (воздействуют на остатки груза струями сжатого воздуха или газа, а также различные пылесосы) и гидравлические (воздействуют на остатки груза струями воды). [c.190]
В зависимости от типа склада, вида материалов, технологии производства погрузочно-разгрузочных работ применяют различные типы машин и механизмов на складах цемента — специализированные погрузочно-разгрузочные машины пневматического принципа действия на складах заполнителей бетонов и растворов — специальные разгрузчики скребкового и черпающего типа, вибрационные и рыхлительные установки, ленточные конвейеры, одноковшовые экскаваторы, а также краны с грейферным ковшом и погрузчики на складах для штучных грузов —- краны башенные, мостовые, стреловые, козловые, портальные, штабелеры, авто- и электропогрузчики и другие средства напольного транспорта. [c.17]
Наиболее широкое применение находят вибрационные машины, работающие в режиме прямолинейных гармонических колебаний. Элект-ровибрационные питатели могут одновременно выполнять функции затворов. По принципу действия электровибрационные питатели относятся к двухтактным резонансным колебательным системам, в которых обе массы связаны между собой упругими элементами. При этом рабочий орган (лоток), балка-обойма, скоба и якорь электромагнита относятся к активной массе, а корпус, траверса и сердечник электромагнита с катушками — к реактивной массе. [c.261]
Приводятся основные определения и теоремы, излагается математический аппарат вибрационной механики—нового направления в теории механических колебаний, характеризуемого математическим подходом к описанию и исследованию широкого круга явлений, имеющих место при действии вибрации на нелинейные механические системы и лежащих в основе ряда современных машин и технологий. Специальные разделы посвящены вибрационной механике механизмов и машин, синхронизации роторов, вибрационному перемещению и смещению, виброреологии. Существенно обобщается принцип автобалансировки Лаваля, рассматриваются приложения к теории резонансов в орбитальных движениях небесных тел. [c.2]
Вибрационные машины и принцип их действия
из «Теория машин и механизмов »
Таким образом, суммарная сила инерции 2F a щек а полностью уравновешивает силу инерции F ,ь шатунной шейки. Из уравнения моментов всех сил инерции относительно точки следует, что момент от всех сил инерции масс вала также равен нулю. Таким образом, мы имеем равенство нулю как главного вектора сил инерции, так и главного вектора момента от сил инерции вала, т. е. этот вал полностью уравновешен.
[c.293]
При этом, как было показано выше в 59, динамические нагрузки от сил инерции масс звеньев будут равны нулю и при вращении вала с угловым ускорением е.
[c.293]
ПОСТОЯННОГО множителя, то величину вектора результирующего момента можно подсчитать, не вводя этого множителя.
[c.295]
Плоскость действия уравновешивающей пары вполне определится замыкающим вектором тоРо2о- Она перпендикулярна к этому вектору и содержит ось z—г. Уравновешивающие массы гпд могут быть в этой плоскости установлены в любых точках вала. В качестве плоскостей установки уравновешивающих грузов с мас- сой ntg по оси 2—Z выбираем те же плоскости То и Т. Тогда при заданном расстоянии г между этими плоскостями необходимо подобрать такие значения масс т и расстояний ро их центров масс от оси Z—2, чтобы удовлетворялось равенство (13.61). Одна из этих масс устанавливается так, чтобы ее центр масс находился в плоскости Tq] другая масса устанавливается так, чтобы ее центр масс находился в плоскости Т. Знак момента этой пары определяется замыкающим вектором многоугольника моментов (рис. 13.40, в).
[c.295]
Таким образом, установкой двух противовесов массы и одного противовеса массы m достигается полное уравновешивание всех масс, закрепленных на валу. Так как один из противовесов массы Шо расположен в той же плоскости Т (рис. 13.40, а), что и противовес массы т, то массы и т можно заменить одной массой. Следовательно, полное уравновешивание масс, закрепленных на валу, может быть достигнуто установкой двух противовесов, центры масс которых лежат в двух произвольно выбранных плоскостях.
[c.295]
ТО СИЛЫ инерции ротора будут полностью уравновешены.
[c.297]
Если вывести раму с ротором из равновесия (например, надавить на один из подшипников, а потом отпустить его), то рама придет в колебательное движение, которое вследствие сопротивления воздуха и трения в оси 0—0 будет затухающим и прекратится.
[c.297]
Частота k этого колебания является постоянным параметром для данной установки она зависит от момента инерции колеблющейся системы относительно оси 00, жесткости пружины и в малой степени от сопротивления среды и называется частотой собственных свободных) колебаний системы.
[c.297]
Если определить постоянную ц данного станка, то по амплитуде А, зафиксированной на индикаторе D, можно установить величину силы определяющей дисбаланс, отнесенный к плоскости /. Это дает возможность определить искомое значение miti.
[c.297]
Таким же образом, повторив испытание, но установив ротор плоскостью / на место плоскости II, можно определить и значение тцГц.
[c.297]
Для определения коэффициента пропорциональности х и направлений, в которых необходимо установить массы rrii и Шц, можно воспользоваться приемом, который сводится к тому, что к балансируемой детали искусственно присоединяется дополнительная масса /Ид на некотором расстоянии Рд от оси вращения детали. Обычно в качестве такой массы берут кусок пластилина массы Отд, и этот кусок прикрепляют к поверхности балансируемой детали. На рис. 13.41 куски этой массы показаны на поверхности фланца В. Масса Шд носит название корректирующей массы.
[c.298]
Разгоняем ротор до быстрого вращения, после чего отключаем приводное устройство, переводим ротор в режим выбега и измеряем величину максимальной амплитуды на индикаторе D. Пусть эта амплитуда равна Л, (мм).
[c.298]
Устанавливаем корректирующую массу Шд (рис. 13.41) в плоскости / на расстоянии рд от оси г—г, равном внешнему радиусу флаица, приводим во вращение ротор и снова замеряем на индикаторе наибольшую амплитуду. Пусть эта амплитуда равна А . Наконец, устанавливаем корректирующую массу на том же расстоянии Рд от центра фланца В, но по другую сторону от него, и приводим GO вращение ротор и снова замеряем наибольшую амплитуду. Пусть эта амплитуда равна А . По полученным амплитудам Л], Ла и Лз можно определить величину miti (см. формулу (13.64)). На рис. 13.44, а показана сила вызывающая вынужденные колебания в первом испытании.
[c.298]
Поменяв местами плоскости / и /У, т. е. установив ротор на станке так, чтобы его ось была повернута на 180° относительно первоначального положения, мы тем же способом можем найти статический момент ШцГц уравновешивающего противовеса гпц, устанавливаемого в плоскости II. Практически устранение неуравновешенности производится или удалением части массы детали, или закреплением дополнительной массы.
[c.300]
Таким образом, установив в плоскостях lull противовесы nii и гпц, мы полностью уравновешиваем силы инерции ротора.
[c.300]
Вибрационные машины получили большое распространение в различных отраслях промышленности и в сельском хозяйстве. С помощью вибраций дробят, измельчают, транспортируют кусковой и сыпучий материал, разделяют смеси, уплотняют бетон, погружают сваи и шпунт в грунт, просеивают различные продукты. Используют вибрации и в быту (например, вибрационные бритвы). Обрабатываемые среды под действием вибраций становятся более податливыми , что способствует интенсификации технологического процесса.
[c.300]
Данный параграф написан А. П, Бессоновым.
[c.300]
Во-первых, вибрационная машина является колебательной системой, состоящей из возбудителя колебаний — вибратора и колеблющейся массы, т. е. рабочего органа и частей, жестко с ним скрепленных. Во-вторых, рабочий процесс в вибромашинах получается в результате суммарного эффекта большого количества отдельных циклов, следующих один за другим. Хотя эффект за один цикл является незначительным, но высокая частота этих циклов делает эти машины высокоэффективными.
[c.301]
Обозначим через х линейную координату перемещения массы М, тогда упругая сила пружины будет —сх, где с — жесткость пружины. Демпфирующие свойства системы представим тоже в виде линейной функции скорости —Ьх.
[c.302]
Вернуться к основной статье
Вибрационная машина — Энциклопедия по машиностроению XXL
Силы инерции не всегда являются вредными, с которыми надо бороться. В настоящее время имеется много машин, в которых для выполнения того или иного технологического процесса намеренно возбуждаются колебания. Машины, в которых технологический процесс выполняется на основе возбужденных колебаний, называют вибрационными машинами. Возбудителями колебаний в этих машинах могут быть механические и электромагнитные вибраторы, гидравлические и пневматические пульсаторы. Рабочему органу машины, взаимодействующему с обрабатываемой средой, необходимо придать колебательное движение с желаемой частотой колебаний и амплитудой.
[c.300]
Вибрационные машины получили большое распространение в различных отраслях промышленности и в сельском хозяйстве. С помощью вибраций дробят, измельчают, транспортируют кусковой и сыпучий материал, разделяют смеси, уплотняют бетон, погружают сваи и шпунт в грунт, просеивают различные продукты. Используют вибрации и в быту (например, вибрационные бритвы). Обрабатываемые среды под действием вибраций становятся более податливыми , что способствует интенсификации технологического процесса.
[c.300]
ВИБРАЦИОННЫЕ МАШИНЫ И ПРИНЦИП ИХ ДЕЙСТВИЯ 301 [c.301]
Во-первых, вибрационная машина является колебательной системой, состоящей из возбудителя колебаний — вибратора и колеблющейся массы, т. е. рабочего органа и частей, жестко с ним скрепленных. Во-вторых, рабочий процесс в вибромашинах получается в результате суммарного эффекта большого количества отдельных циклов, следующих один за другим. Хотя эффект за один цикл является незначительным, но высокая частота этих циклов делает эти машины высокоэффективными. [c.301]
На рис. 13.47 изображена динамическая модель вибрационной машины. Дебалансный возбудитель направленного действия создает возбуждающую колебания силу периодического действия, которая передается массе Л1, а с массой М связан исполнительный орган — или сито для просеивания или разделения материалов, или дека для вибротранспортирования материалов и т. д. Пружина с жесткостью с и демпфер с коэффициентом затухания Ь моделируют систему упругой подвески к неподвижному корпусу машины, взаимо- [c.302]
Если выписать полное решение этого линейного дифференциального уравнения второго порядка с правой частью, то получим закон движения массы М, в котором будут смешаны свободные колебания системы, зависящие от начальных условий и параметров системы, и вынужденные колебания, определяемые характером возбуждения и параметрами системы. Как показывает практика, свободные колебания в системе затухают довольно быстро и остаются лишь вынужденные колебания. Вибрационные машины основной технологический процесс выполняют в установившемся режиме, когда свободные колебания уже затухнут, [c.302]
Задача 370. Вибрационная машина приводится в движение посредством кулисы, изображенной на рис. а. Кривошип кулисы ОА веса Ру и длины г вращается в направлении по часовой стрелке с постоянной угловой скоростью и). [c.368]
Внедрение новых технологических процессов, в частности использование эффекта вибраций, способствовало широкому развитию работ по динамике вибрационных машин и механизмов, используемых в горной и металлургической промышленности, в дорожно-строительной технике, в сельскохозяйственном производстве, системах питания автоматических машин и стендах для испытания приборов и т. д. При исследовании динамики таких машин и механизмов изучались стационарные режимы работы и определялись области их устойчивости. Одновременно разрабатывались вопросы механики сред и материалов, обрабатываемых с помощью вибрационных машин. [c.30]
Н и к о л е н к о Г. И. Теория амортизации вибрационных машин,— Сб. Механика и расчет машин вибрационного типа,— М, Изд, АН СССР, 1957.
[c.343]
Иногда для привода вибрационных машин пользуются группой вибраторов. В таком случае возникает вопрос об их синхронной и синфазной работе. И. И. Блехман посвятил серию ра-бот синхронизации механических вибраторов без принудительной кинематической связи (самосинхронизация) [41], [43] и [45] и синхронизации с помощью привода дебалансов от синхронных электродвигателей [44]. [c.12]
При изучении этой системы необходимо принимать во внимание механическую характеристику двигателя, диссипативные свойства, характеризующие рассеяние энергии системы и взаимодействие обрабатываемого продукта с вибрирующим органом. Однако во многих вибрационных машинах силы взаимодействия продукта с рабочим органом малы, незначительны также диссипативные силы при возвратно-поступательном движении массы М. В таких вибраторах мощность двигателя расходуется только на преодоление трения в зубчатых передачах и во вращательных кинематических парах. Тогда обобщенные силы можно принять равными нулю. Рассмотрение движения указанной системы без внешних сил позволяет оценить влияние конструктивных параметров на характер движения системы. [c.125]
В системе машина — окружающее оборудование промежуточным звеном являются различные устройства, ограничивающие вредные воздействия (в основном вибрационные) машины на близко расположенное другое оборудование. [c.314]
Вынужденные колебания фундамента создают с помощью специальных вибрационных машин. [c.335]
Частоту вращения установленной на конструкцию вибрационной машины увеличивают ступенями. Продолжительность действия каждой ступени назначают так, чтобы за это время колебания конструкции приняли установившийся характер. Число и величину ступеней выбирают с таким расчетом, чтобы по замеряемым амплитудам и расходу энергии можно было получить кривую их изменения. [c.335]
Г о н ч а р е в и ч И, Ф., Принципиальное устройство привода вибрационных машин (вибраторов) и направление его развития Сб. Применение вибротехники в горном деле . Госгортехиздат 1960. [c.383]
Область применения вибрационных машин и машин ударного действия непрерывно растет и в настоящее время широко охватывает строительную индустрию, транспортную технику, горную промышленность, литейное производство, машиностроение и металлообработку и другие отрасли техники. [c.664]
Теория вибрационных машин включает два тесно примыкающие вопроса специфику среды, находящейся под воздействием вибраций и динамику собственно машины вибрационного действия. [c.665]
Сравнительно простые но конструкции вибрационные машины представляют собой динамическую систему, в которой форма траектории, закон изменения скорости и,ускорения рабочего органа зависят не от геометрических размеров, звеньев, а От динамических параметров машины величин масс и жесткостей упругих элементов, характера возмущения, создаваемого приводом, факторов демпфирования и т. д. [c.665]
Проектирование или динамический анализ вибрационной машины требует составления и решения линейных, а зачастую нелинейных дифференциальных уравнений и представляет часто значительные трудности, разрешаемые в настоящее время с помощью электронно-моделирующих установок. [c.665]
Существенно важным конструктивным элементом вибрационных машин являются вибраторы. [c.665]
Для низкочастотных вибрационных машин целесообразно применять регулируемый эксцентриковый привод, создающий большие возмущающие силы при малой скорости вращения. При повышенных Частотах колебаний эксцентриковый привод используется только в уравновешенных машинах, работающих в резонансном режиме. [c.665]
Применение инерционных вибраторов в низкочастотных машинах требует увеличения неуравновешенных масс, а для высокочастотных машин приводит к перегрузке подшипников. В крупных мощных вибрационных машинах, эксплуатируемых на средних частотах, инерционные вибраторы незаменимы, так как позволяют при малых габаритах и массе создать значительные возмущения. Вследствие значительного времени пуска и выбега применение инерционных вибраторов в питателях и точных дозаторах ограничено. [c.665]
| Рис. 11.81. Ударно-вибрационная машина для изготовления литейных форм и стержней. Вибратор I с ударником б подвешен под столом 2 с наковальней 7 на пружинах 3, подобранных на ударный резонанс. На столе укрепляется модель 4 и опока 5 с формовочной смесью. При надлежащем подборе зазора (натяга) между наковальней и ударником, последний будет наносить периодические удары. Одновременно с формовкой действием ударов и вибраций может осуществляться прессование, если предусмотреть податливую упругую подушку 9. Пружины S служат амортизаторами машины. |
| Рис. 12.81. Приводная упругая связь. Резиновые элементы D виде шайб, работающие по принципу мембран, применяются в вибрационных машинах для соединения шатуна привода (например, эксцентрикового) с колеблющейся массой. |
Размеры 8—146 Вибрационные машины выбивные пневматические 6 — 202 Вибрационные машины стержневые 0-14
[c.34]
Стержень бесконечно длинный — Теплопроводность 1 (1-я) — 251 Стержень, ограниченный с двух концов — Теплопроводность 1 (1-я) — 251 Стержневые вибраторы 8—150 Стержневые вибрационные машИны 0-14 [c.287]
Выбитые отливки, имеющие массивные стержни, должны перед выбивкой стержней подвергаться промежуточному охлаждению. Механическая выбивка стержней производится с помощью пневматических вибрационных машин (нокаутов) или в гидрокамерах с помощью водяной струи. [c.201]
Выбивные вибрационные машины (пневматические) [c.202]
Вибраторы и специальные вибрационные машины для выбивки стержней [c.150]
Конечно, во многих случаях вибрационные машины явля ются более сложными, чем показано в этом параграфе упругая сила подвески и демпфирующая сила — нелинейные, скорость вращения дебалансов не принимается постоянной, а учитывается характеристика двигателя, и подвеска часто обеспечивает движение массы не только прямолинейное, но и плоское или пространственное в некоторых случаях приходится учитывать присоединяемую к М массу обрабатываемого продукта. [c.303]
Механизмы с несколькими степенями свободы находят все болыиее применение в различных отраслях техники разнообразные динамические упругие муфты, трансформаторы крутящих моментов, механизмы для сборки покрышек колес, вариаторы, дифференциальные зубчатые механизмы, механизмы простейших автооператоров и роботов, вибрационные машины. [c.356]
В первую очередь вибрация оказывает вредное влияние на рабочих, использующих ручные механизированные инструменты, на персонал, обслуживающий вибрационные машины (виброгрохоты, вибромолоты, виброштамповки свай, труб и т. п., виброконвейеры, виброкатки, виброуплотиители, вибросепараторы, вибраторы жидкого металла, средства вибрационной очистки и т. д.), а также многие строительные, дорожные и сельскохозяйственные машины (бульдозеры, грейдеры, скреперы, тракторы, комбайны и т. д.). В несколько меньшей степени действие вибрации обычно испытывает персонал, связанный с работой машин и механизмов, содержащих неуравновешенные движущиеся элементы, а также с работой всех видов транспортных средств. В перечисленных случаях возникает необходимость ограничения вредного воздействия вибрации на человека. Допустимые для человека динамические воздействия регламентируются санитарными нормами и правилами. Создание эффективных методов и средств индивидуальной и комплексной виброзащиты человека-оператора является одной из важнейших технико-экономических и социальных задач современной техники. [c.273]
Заформовку оболочковых форм производили следующим образом на стол вибрационной машины ставили подоночные плиты, на которые устанавливали блоки моделей, покрытые оболочкой. Блоки приклеивали к плитам модельной массой и устанавливали опоки, изготовленные из жаропрочной стали. Стыки опок с плитами, чтобы не вытекал жидкий наполнитель, замазывали глиной vuivi модельной массой. Заливку жидким наполнителем опок прюизводи-ли на вибростоле (амплитуда колебания стола составлма 0,3 - [c.203]
С целью нанесения на профилированные изделия покрытий при повышенных плотностях тока (1—10 кА/м ) применяется вибрация суспензий ( абразиветое электроосаждение ). Так, для осаждения никеля и меди были использованы серийные вибрационные машины емкостью 10 и 140 дм [125]. Ниже приведены характеристики частиц применяемых абразивов [c.91]
Исследование периодических режимов движения некоторых типов вибрационных машин (вибробункеры, вибротранспортеры и т. д.) приводит к анализу динамической модели, масса рабочего органа которой периодически изменяется во времени по заданному закону. Причем период изменения массы равен периоду движения рассматриваемой системы. [c.141]
Не менее важное значение для нормальной работы вибрационной машины имеют упругие элементы и опорно-поддерживающпе устройства, влияющие на сроки службы, эксплуатационную надежность и энергоемкость машины. Упругие элементы подразделяются на основные н амортизирующие, Различают металлические упругие элементы, выполненные в виде винтовых пружин, плоских рессор и упругих стержней резпиометаллические, выполняемые в виде прокладок, цилиндров, шаров, пакетов и работающие в зависимости от конструкции на растяжение — сжатие и на сдвиг пневматические упругие элементы, состоящие из резинокордовой оболочки, в которую накачивается сжатый воздух. Находят широкое применение комбинированные упругие элементы. [c.666]
| Рис. 11.30. Секционированная пневмоупругая связь. Гибкие оболочки 1 прижаты к корпусу 4 с помощью фланцев 2. и трубы 3. В центральной части оболочки зажаты с помощью дистанционных трубок 6 и шайб 5, установленных на стержЕге 7, связанном с подвижной частью вибрационной машины. Сжатый воздух через отверстия 8 подается в полость А. Полость Б через отверстия 9 сообщается с атмосферой. |
Конструкционное демпфирование в узлах вибрационных машин. Авт. Хвингия М. В. и др. Тбилиси, Груз, политехи, ин-т, 1973, 138 с. [c.317]
Челомей В.Н. — Вибрации в технике. Том 4. Вибрационные процессы и машины
Вибрации в технике: Справочник. В б-ти т./Ред. совет: В. Н. Челомей (пред.). — М.: Машиностроение, 1981.— Т. 4. Вибрационные процессы и машины / Под ред. Э. Э. Лавендела. 1981. 509 с, ил.
В пер.: 2 р. 50 к.
В четвертом томе изложены теория вибрационного перемещения материальной точки, реальных деталей, сыпучих и других сред; вопросы проектирования и конструирования вибрационных машин (выбора схемы, расчета упругих элементов, самосинхронизации, особенности расчета резонансных и ударных вибрационных машин и перехода через резонанс). Подробно рассмотрены вибровозбудители, применяемые в современной технике. Приведены основные схемы вибрационных машин, используемых в разных областях народного хозяйства. Справочник предназначен для инженерно-технических работников, занятых расчетами, проектированием, изготовлением и эксплуатацией объектов современной техники
ПРЕДИСЛОВИЕ
Четвертый том справочника посвящен полезному применению вибрации, т. е, вибрационным процессам и машинам. В одних случаях определенные технологические процессы могут быть осуществлены только благодаря использованию вибрации, в других — применение вибрации приводит к значительной интенсификации процессов и повышению качественных показателей. Вибрационные машины и технологические процессы в настоящее время используют практически во всех отраслях народного хозяйства.
Весьма широки диапазоны размеров и мощностей вибрационных машин, чрезвычайно разнообразны их назначение и конструкция, различны методы и средства возбуждения вибрации. Конструктивные схемы вибрационных машин, как правило, несложны, но для успешной работы необходимо точно определить их параметры, что можно сделать только на основе исследования динамики вибрационных машин и выполняемых ими технологических процессов.
В первой части тома приведены результаты теоретических исследований вибрационных процессов, представлены их математические модели. Подробно представлено исследование вибрационного транспортирования материальной частицы, более лаконично — вибрационное транспортирование твердых тел, а также поведение сыпучих тел и сплошных сред под действием вибрации. Для этих более сложных (и, естественно, более точных) моделей требуется применять ЭЦВМ. Даны рекомендации, как получить математическое описание процессов, для которых пока не разработаны теоретические модели. Для простейших моделей ставятся и решаются задачи оптимизации, в результате чего определяются идеальные законы движения рабочего органа вибрационной машины, позволяющие судить о том, какую схему машины следует выбрать.
Динамика вибрационных машин опирается на теорию колебаний линейных (т. 1) и нелинейных (г. 2) систем. Поэтому во второй части тома рассмотрены только специфические вопросы расчета и проектирования вибрационных машин, в том числе синтез необходимого поля вибрации, динамическое управление вибрацией рабочих органов машин, моделирование удара, расчет вибрационных машин основных классов, защита от их шума.
В третьей части изложены методы и средства возбуждения вибрации. В соответствии с современным состоянием вибрационной техники большое внимание уделено центробежным и электромагнитным вибровозбудителям. Приведены необходимые сведения также и о вибровозбудителях других типов.
Принципы действия, конструктивные схемы, диапазоны параметров, рекомендации по выбору принципиальных схем и установлению основных параметров вибрационных машин, а также вопросы автоматизации ударно-вибрационных и резонансных машин рассмотрены в четвертой части В качестве авторов тома были привлечены ведущие специалисты в области вибрационных машин и технологических процессов. В разработке структуры и плана тома, а также в предварительных обсуждениях с авторами содержания отдельных глав значительное участие приняли д-р физ.-мат. наук проф. И. И. Блехман и канд. техн. наук И. И. Быховский. Большое разнообразие вибрационных машин и процессов, изобилие публикаций по вопросам их разработки, исследования и использования привели к тому, что при создании тома пришлось решать трудную задачу отбора наиболее важного я Необходимого материала
Редактор тома д-р техн. наук проф. Э. Э. ЛАВЕНДЕЛ
Часть первая
ВИБРАЦИОННЫЕ ПРОЦЕССЫ
Глава I
ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ЧАСТИЦЫ ПО ВИБРИРУЮЩЕЙ ШЕРОХОВАТОЙ ПОВЕРХНОСТИ
1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Закономерности движения частицы, идеализируемой в виде материальной точки, по вибрирующей шероховатой поверхности представляют самостоятельный интерес для теории вибротранспортирования и вибросепарации отдельных тел малых размеров. Эти закономерности интересны также и для теории многих более сложных процессов (см гл. IX т. 2 справочника), например вибрационного разделения сыпучих смесей, вибротранспортирования и сепарации твердых или упругих тел конечных размеров, а также слоя сыпучего материала, вибрационного погружения свай, движения вибрационных экипажей и т. п. Дифференциальные уравнения движения частицы по вибрирующей шероховатой поверхности играют в теории указанных процессов почти столь же фундаментальную роль, что и уравнение движения маятника в общей теории колебаний.
Рассматриваемому кругу вопросов посвящена обширная научная и патентная литература. Приведенный в списке литературы далеко не полный перечень содержит лишь названия публикаций, либо непосредственно связанных с излагаемыми результатами, либо являющихся основными вехами, по которым можно проследить развитие проблемы. Первые исследования принадлежат Г Линднеру [47] и Н. Е. Жуковскому [21]. Обзор работ по состоянию на 1963 г. приведен в книге [6]. Приводимые ниже результаты относятся к случаю, когда вибрирующая поверхность является плоской и совершает поступательные колебания, а поле задаваемых сил, действующих на частицу, однородно и, в частности, представляет собой поле силы тяжести. Эти результаты, однако, могут быть использованы и в общем случае, если перемещение частицы по поверхности за период колебаний мало по сравнению с радиусами кривизны поверхности, а также с расстояниями, на которых траектории колебаний и задаваемые силы претерпевают сколько-нибудь существенные изменения. При указанных условиях переменность вдоль траектории движения частицы поля задаваемых сил, поля траектории колебаний и ориентации элемента поверхности, на котором находится частица, может быть учтена в окончательных результатах чисто параметрически; малыми обычно оказываются и кориолисовы силы при наличии поворотных колебаний поверхности.
…
Виброплита. Виды и характеристики. Какую виброплиту выбрать?
Трамбовка и уплотнение сыпучих материалов, различных видов грунта происходит с применением специализированного оборудования, которое называется виброплита.
Агрегат имеет компактные размеры, что позволяет его без труда транспортировать с объекта на объект, простой в управлении, эффективно выполняет свои функции и в некоторых ситуациях попросту незаменим.
Речь пойдет о том, что такое виброплита, какие существуют ее виды, для чего нужна и как выбрать подходящий под конкретные задачи вариант.
Содержание статьи
Назначение и принцип действия виброплиты
Трамбовочная виброплита представляет собой вибрационную машину, предназначенную для уплотнения сыпучих материалов дорожных оснований, а также грунтов.
Принцип работы основан на вибрационном колебательном воздействии рабочего органа на верхнюю прослойку материала.
За счет достаточно большой массы в паре с вибрацией, виброплита с легкостью трамбует рыхлую поверхность.

Происходит это следующим образом: под действием вибрации более мелкие частицы, например, щебня, изменяют свое расположение, как бы осыпаясь вниз.
Плотность нижней прослойки материала повышается, на поверхности остаются самые крупные фракции, промежуток между которыми заполняется мелкими.
Под самим же весом машины происходит непосредственно прессование материала.
Яркий пример использования виброплиты – укладка асфальта, когда по какой-либо причине эксплуатация полноразмерной строительной техники дорожных служб невозможна или попросту нецелесообразна.
Строительные площадки – еще одно место, где машина используется повсеместно.
Это, в первую очередь, уплотнение грунта, при укладке тротуарной плитки – песка, при декорировании загородных и садовых участков – отсыпки из гравия, натуральных камней или иных подобных материалов.
Уплотняющая виброплита активно применяется при прокладке железнодорожных и трамвайных путей, строительстве спортивных площадок, в ландшафтном дизайне.
Устройство и характеристики
Виброплита состоит из следующих основных механизмов и частей:
- Рабочая плита – плоское металлическое днище, которое непосредственно и оказывает вибрационное воздействие на материал, подвергающийся трамбовке.
- Вибровозбудитель (вибратор) – основная деталь, которая вызывает колебания рабочей плиты. Как правило, имеет форму цилиндра, в котором находится дебалансный вал (или несколько валов).
- Рама с двигателем. Собственно шкив мотора подключается посредством клиноременной передачи к валу вибратора, а сам двигатель монтируется на моторной раме с амортизаторами.
- Водило – фактически рукоять виброплиты, посредством которой оператор направляет движение машины.
Некоторые модели оснащаются различным дополнительным оборудованием, которое не оказывает никакого влияния на основной принцип работы виброплиты.
![]()
Сюда можно отнести водяной бак, амортизирующие перчатки и коврики, предназначенные гасить вибрационную нагрузку, транспортировочные колеса и др.
Материал
При изготовлении различных элементов виброплиты в основном всегда используется сталь, как устойчивый к вибрационным нагрузкам материал.
Иногда применяется алюминий, например, в изготовлении корпуса вибратора или водила.
Рабочая площадка изготавливается из ударопрочной износостойкой стали или чугуна, как наименее подверженного сильному износу материала.
Размеры и вес
Размер рабочей плиты и общий вес устройства определяют глубину уплотнения для различных материалов.
Так масса виброплиты начинается с отметки 60 кг, в более крупных вариациях ее вес может превышать 150 кг.
Для удобства транспортировки, последние оборудуются рамой с рукоятью, за которую мож
различных типов реле, их конструкция, работа и применение
Введение в реле и различные типы реле | Его клеммы, работа и приложения
Реле являются важным компонентом для защиты и переключения ряда цепей управления и других электрических компонентов. Все реле реагируют на напряжение или ток, конечная цель — размыкание или замыкание контактов или цепей.В этой статье кратко обсуждаются основы реле и различные типы реле, которые используются в различных приложениях.
Что такое реле?
Выключатель — это компонент, который размыкает (выключает) и замыкает (включает) электрическую цепь. тогда как реле — это электрический переключатель , который управляет (включает и выключает ) цепью высокого напряжения с использованием источника низкого напряжения. Реле полностью изолирует цепь низкого напряжения от цепи высокого напряжения.
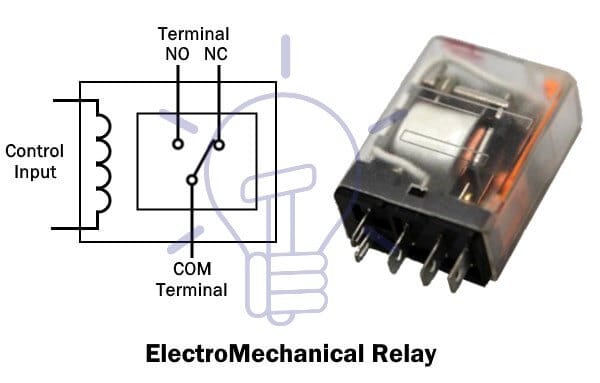
Конструкция реле
Чтобы узнать базовую конструкцию и внутренние части реле , на следующем рисунке ясно показан вид внутри реле . Давайте обсудим их все по порядку. 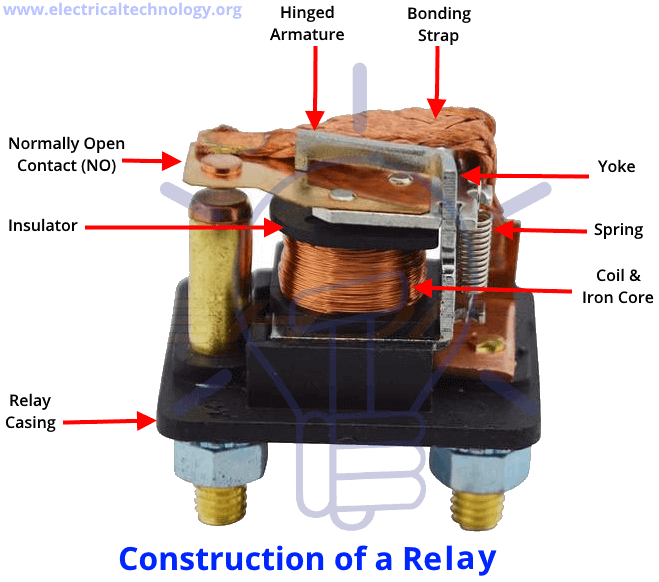
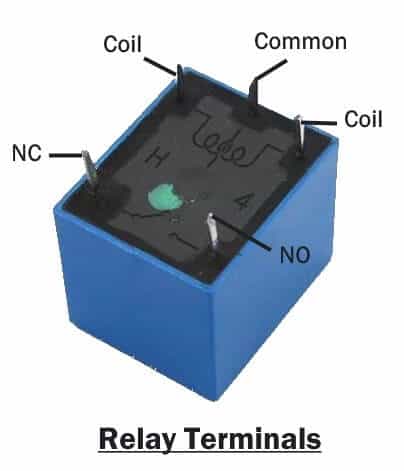
Клеммы реле
Вообще говоря, в реле есть четыре типа клемм.
Входные клеммы управления или клеммы катушки:
Входные клеммы управления — это две входные клеммы реле, которое управляет его механизмом переключения.
К этим клеммам подключен источник малой мощности, чтобы активировать и деактивировать реле. Источник может быть переменного или постоянного тока в зависимости от типа реле.
COM или общая клемма:
COM относится к общей клемме реле.
Это выходная клемма реле, к которой подключен один конец цепи нагрузки.
Эта клемма внутренне связана с любой из двух других клемм в зависимости от состояния реле.
НО Терминал:
НО или Нормально открытый Клемма также является клеммой нагрузки реле, которая остается разомкнутой , когда реле неактивно .
Клемма NO замыкается на клемму COM при срабатывании реле.
NC клемма:
NC или нормально закрытая клемма — это другая клемма нагрузки реле. Эта клемма обычно соединяется с клеммой COM реле, когда нет управляющего входа.
Когда реле активируется, клемма NC отключается от клеммы COM и остается разомкнутой, пока реле не будет деактивировано.
Poles & Throw:
Полюсы относятся к переключателям внутри реле.
Число переключателей внутри реле называется полюсами реле.
число управляемых цепей на полюс называется разбросом реле.
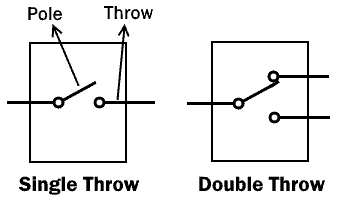
Одноходовое реле может управлять только одним контуром i.е. либо ВЫКЛ. , либо ВКЛ. , в то время как реле двойного хода может управлять двумя цепями, то есть переключаться от одной цепи к другой, размыкая одну цепь и замыкая другую во время переключения (ВКЛ и ВЫКЛ).
Реле Работа :
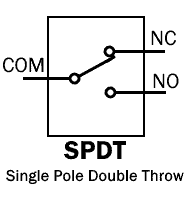
Предположим, что реле SPDT (однополюсное, двойное направление)
Когда нет источника питания, реле неактивно и его положение Полюс остается на клемме NC , которая в вышеупомянутом случае является верхней клеммой.Это приводит к короткому электрическому пути между клеммой COM и NC . Таким образом, он позволяет протекать току через цепь, подключенную к клеммам COM и NC.
Когда реле включается от источника низкого напряжения, полюс реле переключается на клемму NO . Таким образом, клемма NC становится разомкнутой, а клемма COM замыкается или электрически замыкается на клемму NO . Впоследствии, пропуская ток через цепь, подключенную к клеммам COM и NO .
Типы реле:
Существует различных типов реле , и они классифицируются по различным категориям в зависимости от их свойств. Каждый из этих типов реле используется для определенного применения, и перед использованием в любой цепи необходимо выбрать соответствующее реле.
На основе полюсов и направления:
Следующие ниже типы реле классифицируются по количеству полюсов и размещению внутри реле.
Реле SPST
SPST относится к однополюсному однополюсному реле .
Однополюсный означает, что он может управлять только одной цепью, в то время как одиночный бросок означает, что его полюс имеет только одно положение, в котором он может проводить. Диаграмма SPST представлена ниже.
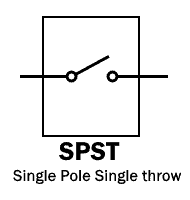
Реле SPST , два состояния, т. Е. либо разомкнутая, либо замкнутая цепь.
Реле SPDT
SPDT относится к однополюсному реле двойного направления.
Однополюсный означает, что одновременно можно управлять только одной цепью. Двойной бросок означает, что его шест имеет два положения, в которых он может вести.
Реле SPDT имеет два состояния, и в каждом состоянии его одна цепь остается замкнутой, а другая остается разомкнутой и наоборот.
Связанное сообщение: Что такое датчик? Различные типы датчиков с областями применения
Реле DPST
DPST относится к двухполюсным одноходовым.
Двойной полюс означает, что он может управлять двумя полностью изолированными отдельными цепями. Одиночный бросок означает, что у каждого шеста есть одно положение, в котором он может вести.
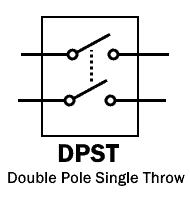
Реле DPST может переключать две цепи одновременно, т. Е. Обеспечивать замыкание или размыкание цепи.
Реле DPDT
DPDT относится к двухполюсному двойному ходу.
Двойной полюс означает, что он может управлять двумя цепями, в то время как двойной ход означает, что каждый полюс может проводить в двух отдельных положениях.

Реле DPDT можно интерпретировать как два реле SPDT, но их переключение происходит одновременно.
Реле может иметь до 12 полюсов.
Формы реле
Типы реле также классифицируются на основе их конфигурации, известной как « Формы ».
Реле «Форма A»
« Форма A » — это реле SPST с нормально разомкнутым ( NO ) состоянием по умолчанию.
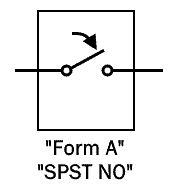
Он имеет клемму NO, которая подключает цепь, когда реле активировано, и отключает цепь, когда реле деактивируется.
Реле «Форма B»
Реле формы B является реле SPST с нормально замкнутым ( NC ) состоянием по умолчанию.
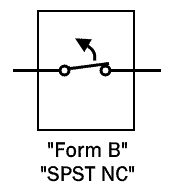
Клемма NC подключает цепь, когда реле неактивно, и отключает цепь, когда реле активируется.
Реле «формы C»
Реле формы C — это реле SPDT с двойными контактными клеммами, известное как NC и NO .

Управляет двумя контурами i.е. одна цепь остается разомкнутой, а другая — замкнутой. Оно также известно как реле « прерывание перед замыканием », поскольку оно размыкает одну цепь перед замыканием другой цепи.
Реле «формы D»
Реле формы D также является реле SPDT и имеет тот же принцип, что и реле формы C, но является контактным реле « замыкает перед разрывом ».
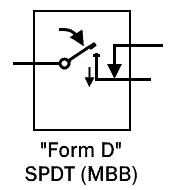
Замыкает следующую цепь перед разрывом (размыканием) первой цепи.Он используется, чтобы не нарушать целостность цепи.
На основе принципов работы:
Следующие ниже типы реле классифицируются в зависимости от их различных принципов работы.
EMR (электромеханическое реле)
Реле этого типа имеет электромагнитную катушку и механический подвижный контакт .
Когда катушка находится под напряжением, она создает магнитное поле. Это магнитное поле притягивает якорь (подвижный контакт).Когда катушка обесточена, катушка ослабляет магнитное поле, и пружина возвращает якорь в нормальное положение.
Реле EMR разработано для источника переменного или постоянного тока, в зависимости от области применения. Конструкция реле ЭМИ переменного и постоянного тока отличается друг от друга небольшой разницей в конструкции катушки . Катушка постоянного тока имеет свободно вращающийся диод для защиты от обратной ЭДС и обесточивания катушки.
Полярность источника в реле ЭМИ не имеет значения, он питает катушку в любом случае, но если установлен диод обратной ЭДС, следует учитывать полярность.
Главный недостаток реле EMR заключается в том, что его контакты образуют дугу при размыкании, что приводит к увеличению его сопротивления со временем и сокращению срока службы реле.
SSR (твердотельное реле)
SSR реле состоит из полупроводников, а не механических частей, и работает для изоляции цепи низкого напряжения от цепи высокого напряжения с помощью оптопары.
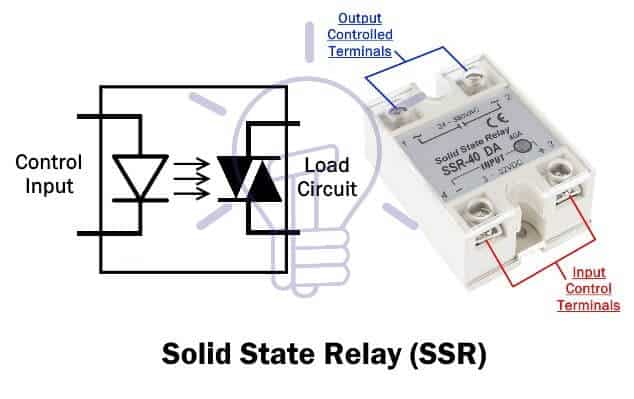
Когда управляющий вход применяется к твердотельному реле, загорается светодиод , излучающий инфракрасный свет. Этот свет принимается светочувствительным полупроводниковым устройством, которое преобразует световой сигнал в электрический сигнал и переключает цепь.
SSR работает на относительно высокоскоростных и имеет очень низкое энергопотребление по сравнению с реле EMR. Его срок службы на больше , потому что нет физических контактов, которые могли бы сгореть.
Основным недостатком реле SSR является его номинальное падение напряжения на полупроводнике, что приводит к потере энергии в виде тепла .
Гибридное реле:
Гибридные реле изготавливаются с использованием как реле SSR, так и реле EMR .
Как мы знаем, SSR тратит энергию в виде тепла и EMR имеет контакт , вызывающий дугу . Гибридное реле использует как SSR, так и EMR, чтобы преодолеть их недостатки.
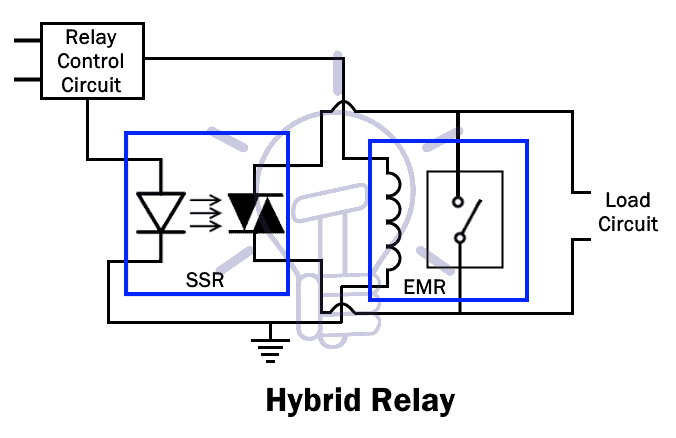
В гибридном реле SSR и EMR используются в параллельном . Реле , цепь управления используется для переключения SSR в первую очередь. SSR принимает ток нагрузки. Таким образом, это устраняет проблему изгиба. Затем цепь управления подает питание на катушку ЭМИ, и ее контакт замыкается, но дуги не происходит, так как SSR принимает нагрузку параллельно. Через некоторое время, когда контакт ЭМИ успокоится, управляющий вход ТТР снимается. ЭМИ проводит весь ток нагрузки без потерь.Поскольку SSR не пропускает ток, а EMR принимает на себя всю нагрузку, потери мощности в виде тепла отсутствуют. Таким образом, это также устраняет проблему нагрева.
Связанное сообщение: Типы микросхем. Классификация интегральных схем и их ограничения
Герконовое реле
Герконовое реле состоит из герконового переключателя и электромагнитной катушки с диодом для обратной ЭДС.
Геркон состоит из двух металлических лезвий, сделанных из ферромагнитного материала, герметично запечатанных в стеклянной трубке, которая также поддерживает металлические лезвия.Стакан заполнен инертным газом.
.
Автоматизация | Британника
Автоматизация , применение машин к задачам, которые раньше выполнялись людьми, или, все чаще, к задачам, которые иначе были бы невозможны. Хотя термин «механизация» часто используется для обозначения простой замены человеческого труда машинами, автоматизация обычно подразумевает интеграцию машин в самоуправляемую систему. Автоматизация произвела революцию в тех областях, в которых она была внедрена, и едва ли есть какой-либо аспект современной жизни, на который она не повлияла.
Термин «автоматизация» появился в автомобильной промышленности примерно в 1946 году для описания все более широкого использования автоматических устройств и средств управления на механизированных производственных линиях. Происхождение этого слова приписывается Д.С. Хардеру, в то время руководителю инженерного отдела Ford Motor Company. Этот термин широко используется в производственном контексте, но он также применяется за пределами производства в связи с множеством систем, в которых происходит значительная замена человеческих усилий и интеллекта механическими, электрическими или компьютеризированными действиями.
В общем случае автоматизация может быть определена как технология, связанная с выполнением процесса с помощью запрограммированных команд в сочетании с автоматическим управлением с обратной связью для обеспечения надлежащего выполнения инструкций. Полученная система способна работать без вмешательства человека. Развитие этой технологии становится все более зависимым от использования компьютеров и компьютерных технологий. Следовательно, автоматизированные системы становятся все более изощренными и сложными.Продвинутые системы представляют собой уровень возможностей и производительности, который во многих отношениях превосходит возможности людей выполнять те же действия.
Технология автоматизации достигла такой степени, что на ее основе развился ряд других технологий, получивших признание и собственный статус. Робототехника — одна из таких технологий; это специализированная отрасль автоматизации, в которой автоматизированная машина обладает определенными антропоморфными или человекоподобными характеристиками.Наиболее типичная человеческая характеристика современного промышленного робота — это его механическая рука с приводом. Рука робота может быть запрограммирована на выполнение последовательности движений для выполнения полезных задач, таких как загрузка и разгрузка деталей на производственной машине или выполнение последовательности точечной сварки на деталях из листового металла кузова автомобиля во время сборки. Как видно из этих примеров, промышленные роботы обычно используются для замены рабочих на фабриках.
Получите эксклюзивный доступ к контенту нашего 1768 First Edition с подпиской.Подпишитесь сегодня
В этой статье рассматриваются основы автоматизации, включая ее историческое развитие, принципы и теорию работы, приложения в производстве, а также в некоторых сферах услуг и отраслей, важных в повседневной жизни, а также влияние на человека и общество в целом. В статье также рассматривается развитие и технология робототехники как важная тема автоматизации. По связанным темам см. Информатика и обработка информации.
Историческое развитие автоматизации
Технология автоматизации возникла из смежной области механизации, которая зародилась в период промышленной революции.Механизация относится к замене силы человека (или животного) механической силой той или иной формы. Движущей силой механизации была склонность человечества создавать инструменты и механические устройства. Здесь описаны некоторые важные исторические достижения в области механизации и автоматизации, ведущие к современным автоматизированным системам.
Ранние разработки
Первые орудия из камня отражали попытки доисторического человека направить свою физическую силу под контроль человеческого разума.Несомненно, тысячи лет потребовались для разработки простых механических устройств и механизмов, таких как колесо, рычаг и шкив, с помощью которых можно было увеличить силу человеческих мышц. Следующим шагом была разработка механических машин, для работы которых не требовалась человеческая сила. Примеры этих машин включают водяные колеса, ветряные мельницы и простые паровые устройства. Более 2000 лет назад китайцы разработали трип-молоты, приводимые в движение проточной водой и водяными колесами.Ранние греки экспериментировали с простыми реактивными двигателями, работающими от пара. Механические часы, представляющие собой довольно сложную сборку с собственным встроенным источником питания (гирькой), были разработаны около 1335 года в Европе. Ветряные мельницы с механизмами автоматического поворота парусов были разработаны в средние века в Европе и на Ближнем Востоке. Паровая машина представляла собой крупный шаг в развитии механических машин и положила начало промышленной революции. За два столетия, прошедшие с момента появления парового двигателя Ватта, были разработаны двигатели и механизмы, которые получают энергию из пара, электричества, химических, механических и ядерных источников.
Каждая новая разработка в истории механизированных машин привносила повышенные требования к устройствам управления, чтобы использовать мощность машины. Самые ранние паровые машины требовали, чтобы человек открывал и закрывал клапаны, сначала для впуска пара в поршневую камеру, а затем для его выпуска. Позже был разработан золотниковый механизм для автоматического выполнения этих функций. Тогда единственной потребностью человека-оператора было регулирование количества пара, регулирующего скорость и мощность двигателя.Эта потребность в человеческом внимании при работе паровой машины была устранена с помощью регулятора летающего шара. Это устройство, изобретенное Джеймсом Ваттом в Англии, состояло из утяжеленного шара на шарнирном рычаге, механически соединенного с выходным валом двигателя. Когда скорость вращения вала увеличивалась, центробежная сила заставляла утяжеленный шар перемещаться наружу. Это движение управляло клапаном, который уменьшал количество пара, подаваемого в двигатель, тем самым замедляя двигатель. Регулятор с летающим шаром остается элегантным ранним примером системы управления с отрицательной обратной связью, в которой увеличивающийся выход системы используется для уменьшения активности системы.
Отрицательная обратная связь широко используется как средство автоматического управления для достижения постоянного рабочего уровня системы. Типичным примером системы управления с обратной связью является термостат, используемый в современных зданиях для регулирования температуры в помещении. В этом устройстве снижение температуры в помещении вызывает замыкание электрического переключателя, таким образом, включается нагревательный элемент. При повышении температуры в помещении переключатель размыкается и подача тепла отключается. Термостат можно настроить на включение нагревательного элемента при любой конкретной уставке.
Еще одним важным достижением в истории автоматизации стал жаккардовый ткацкий станок (см. Фотографию), который продемонстрировал концепцию программируемого станка. Около 1801 года французский изобретатель Жозеф-Мари Жаккар изобрел автоматический ткацкий станок, способный создавать сложные узоры на текстиле, управляя движениями множества челноков из нитей разного цвета. Выбор различных рисунков определялся программой, содержащейся в стальных картах, в которых были пробиты отверстия. Эти карты были предками бумажных карт и лент, которые управляют современными автоматами.Концепция программирования машины получила дальнейшее развитие в конце XIX века, когда Чарльз Бэббидж, английский математик, предложил сложную механическую «аналитическую машину», которая могла бы выполнять арифметические операции и обработку данных. Хотя Бэббидж так и не смог его завершить, это устройство было предшественником современного цифрового компьютера. Смотри компьютеры, историю.
Жаккардовый ткацкий станок Жаккардовый ткацкий станок, гравюра, 1874 г. В верхней части машины находится стопка перфокарт, которые будут подаваться в ткацкий станок для управления ткацким рисунком.Этот метод автоматической выдачи машинных инструкций использовался компьютерами еще в 20 веке. Архив Беттмана .