Выбор автомата трехфазного двигателя: Выбор автомата защиты и контактора по мощности двигателя
Выбор автомата защиты и контактора по мощности двигателя
Используя информацию из таблицы ниже можно по мощности трехфазного двигателя (или его номинальному току) выбрать автомат защиты двигателя и подходящий контактор. Под таблицей даны ответы на вопросы. В таблице показано наличие изделий: зеленый — в наличии, голубой — ожидается, серый — под заказ.
| Мощность двигателя 3~400В, кВт | Диапазон уставки, А Imin – Iном | Ток мгновенного расцепителя, А (авт. выключателя) | Ном. откл. способн., кА (авт. выключателя) | Автомат защиты двигателя | Модуль соединения | Контактор | Адаптер на DIN-рейку |
| — | 0,10 – 0,16 | 2,1 | 100 | M4-32T-0,16 | M4 32 VK1 | K1-09D10 230 | — |
| 0,06 | 0,16 – 0,25 | 3,3 | 100 | M4-32T-0,25 | M4 32 VK1 | K1-09D10 230 | — |
| 0,09 | 0,25 – 0,4 | 5,2 | 100 | M4-32T-0,4 | M4 32 VK1 | K1-09D10 230 | — |
| 0,18 | 0,4 – 0,63 | 8,2 | 100 | M4-32T-0,63 | M4 32 VK1 | K1-09D10 230 | — |
| 0,25 | 0,63 – 1 | 13 | 100 | M4-32T-1 | M4 32 VK1 | K1-09D10 230 | — |
| 0,55 | 1,0 – 1,6 | 20,8 | 100 | M4-32T-1,6 | M4 32 VK1 | K1-09D10 230 | — |
| 0,75 | 1,6 – 2,5 | 32,5 | 100 | M4-32T-2,5 | M4 32 VK1 | K1-09D10 230 | — |
| 1,5 | 2,5 – 4 | 52 | 100 | M4-32T-4 | M4 32 VK1 | K1-09D10 230 | — |
| 2,2 | 4 – 6 | 78 | 100 | M4-32T-6 | M4 32 VK1 | K1-09D10 230 | — |
| 3 | 5 – 8 | 104 | 100 | M4-32T-8 | M4 32 VK1 | K1-09D10 230 | — |
| 4 | 6 – 10 | 130 | 50 | M4-32T-10 | M4 32 VK1 | K1-09D10 230 | — |
| 5,5 | 9 – 13 | 169 | 50 | M4-32T-13 | M4 32 VK1 | K1-12D10 230 | — |
| 7,5 | 11 – 17 | 221 | 20 | M4-32T-17 | M4 32 VK3 | K3-18ND10 230 | — |
| 7,5 | 14 – 22 | 286 | 15 | M4-32T-22 | M4 32 VK3 | K3-22ND10 230 | — |
| 11 | 18 – 26 | 338 | 15 | M4-32T-26 | M4 32 VK3 | K3-22ND10 230 | — |
| 15 | 22 – 32 | 416 | 15 | M4-32T-32 | M4 32 VD | K3-32A00 230 | M4 32 HU1 |
| | |||||||
| — | 0,10 – 0,16 | 2,1 | 100 | M4-32R-0,16 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,06 | 0,16 – 0,25 | 3,3 | 100 | M4-32R-0,25 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,09 | 0,25 – 0,4 | 5,2 | 100 | M4-32R-0,4 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,18 | 0,4 – 0,63 | 8,2 | 100 | M4-32R-0,63 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,25 | 0,63 – 1 | 13 | 100 | M4-32R-1 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,55 | 1,0 – 1,6 | 20,8 | 100 | M4-32R-1,6 | M4 32 VK3 | K3-10ND10 230 | — |
| 0,75 | 1,6 – 2,5 | 32,5 | 100 | M4-32R-2,5 | M4 32 VK3 | K3-10ND10 230 | — |
| 1,5 | 2,5 – 4 | 52 | 100 | M4-32R-4 | M4 32 VK3 | K3-10ND10 230 | — |
| 2,2 | 4 – 6 | 78 | 100 | M4-32R-6 | M4 32 VK3 | K3-10ND10 230 | — |
| 3 | 5 – 8 | 104 | 100 | M4-32R-8 | M4 32 VK3 | K3-10ND10 230 | — |
| 4 | 6 – 10 | 130 | 100 | M4-32R-10 | M4 32 VK3 | K3-10ND10 230 | — |
| 5,5 | 9 – 13 | 169 | 100 | M4-32R-13 | M4 32 VK3 | K3-14ND10 230 | — |
| 7,5 | 11 – 17 | 221 | 50 | M4-32R-17 | M4 32 VK3 | K3-18ND10 230 | — |
| 7,5 | 14 – 22 | 286 | 50 | M4-32R-22 | M4 32 VK3 | K3-22ND10 230 | — |
| 11 | 18 – 26 | 338 | 50 | M4-32R-26 | M4 32 VK3 | K3-22ND10 230 | — |
| 15 | 22 – 32 | 416 | 50 | M4-32R-32 | M4 32 VD | K3-32A00 230 | M4 32 HU1 |
| | |||||||
| 12,5 | 18 – 26 | 338 | 50 | M4-63R-26 | M4 63 VD | K3-32A00 230 | M4 63 HU1 |
| 15 | 22 – 32 | 416 | 50 | M4-63R-32 | M4 63 VD | K3-32A00 230 | M4 63 HU1 |
| 18,5 | 28 – 40 | 520 | 50 | M4-63R-40 | M4 63 VD | K3-40A00 230 | M4 63 HU1 |
| 22 | 34 – 50 | 650 | 50 | M4-63R-50 | M4 63 VD | K3-50A00 230 | M4 63 HU1 |
| 30 | 45 – 63 | 819 | 50 | M4-63R-63 | M4 63 VD | K3-62A00 230 | M4 63 HU1 |
| | |||||||
| 30 | 45 – 63 | 819 | 50 | M4-100R-63 | M4 100 VD | K3-62A00 230 | M4 100 HU1 |
| 37 | 55 – 75 | 975 | 50 | M4-100R-75 | M4 100 VD | K3-74A00 230 | M4 100 HU1 |
| 45 | 70 – 90 | 1170 | 50 | M4-100R-90 | — | K3-90A00 230 | — |
| — | 80 – 100 | 1300 | 50 | M4-100R-100 | — | K3-115A00 230 | — |
Как осуществлять подбор автоматического выключателя для защиты электродвигателя:
1. Номинальный ток автоматического выключателя должен быть больше или равен номинальному току электродвигателя.
Номинальный ток автоматического выключателя должен быть больше или равен номинальному току электродвигателя.
2. Пусковой ток электродвигателя обычно в 7 раз превышает номинальный (точная величина для конкретного двигателя указывается в паспорте). Т.к. автоматический выключатель не должен срабатывать при пуске двигателя, необходимо удостовериться, что величина в колонке «Ток мгновенного расцепления при к.з.» с некоторым запасом будет выше пускового тока.
Пусковой ток для этих вылей вычисляем по формуле Iном*KРАТН*КОЭФ, где Iном — номинальный ток электродвигателя, КРАТН — кратность пускового тока электродвигателя, КОЭФ — поправочный коэффициент, учитывающий отклонение пускового тока от номинального, колебания напряжения (принимаем равным 1,4).
3. Номинальный ток автоматического включателя должен быть меньше предельно допустимого тока кабеля, которым осуществляется подключение электродвигателя.
Пример: возьмем двигатель АИР90L4 мощностью 2.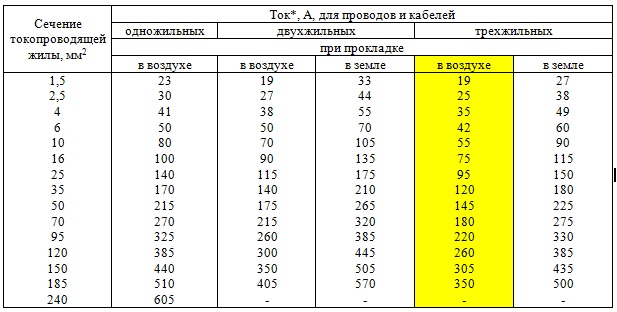 2кВт, в паспорте указаны: номинальный ток Iн (треугольник/звезда) (220/380В) = 8,91А / 5,16А; кратность пускового тока Iп/Iн=6,8.
2кВт, в паспорте указаны: номинальный ток Iн (треугольник/звезда) (220/380В) = 8,91А / 5,16А; кратность пускового тока Iп/Iн=6,8.
По номинальному току электродвигателя (5,16А) выбираем автомат защиты двигателя M4-32T-6 c номинальным током 6А.
Проверяем: пусковой ток 5,16*6,8*1,4=49,12А не превышает «Ток мгновенного расцепления при к.з.» равный 78А.
Т.О. автомат не будет срабатывать при пуске двигателя.
Следовательно данный автоматический выключатель подходит для защиты указанного электродвигателя.
Вопросы и ответы:
В: В каких случаях срабатывает автомат защиты двигателя?
О: Автоматические выключатели M4 снабжены: 1. биметаллическим тепловым размыкателем, который срабатывает в зависимости от уставки по номинальному току двигателя (уставка задается регулятором на лицевой панели), данный размыкатель инерционен и срабатывает тем быстрее, чем выше ток. 2. мгновенным электромагнитным размыкателем, срабатывающим в случае к. з., порог срабатывания в 13 раз выше номинала автоматического выключателя и поэтому позволяет исключить ложные срабатывания при запуске электродвигателя.
з., порог срабатывания в 13 раз выше номинала автоматического выключателя и поэтому позволяет исключить ложные срабатывания при запуске электродвигателя.
В: Чем отличаются автоматы защиты M4-32T.. от M4-32R..?
О: Автоматы защиты M4-32T имеют кнопочный механизм включения, в то время как M4-32R оборудованы поворотным переключателем.
В: Для каких условий эксплуатации предназначены автоматы защиты двигателя M4?
Автоматические выключатели M4 подходят для любого климата. Для исключения ложных срабатываний рекомендуется избегать обдува автоматов свежим или холодным воздухом (от системы кондиционирования). Автоматы защиты M4 предназначены для функционирования в закрытых помещениях при нормальных условиях (т.е. без пыли, приводящих к коррозии паров или вредных газов). В случае использования в помещениях с отличными от нормальных условиями эксплуатации, необходимо использовать защитный корпус IP65, например, M4 32R PFh5 (серый) или M4 32R PFHN4 (желто-красный).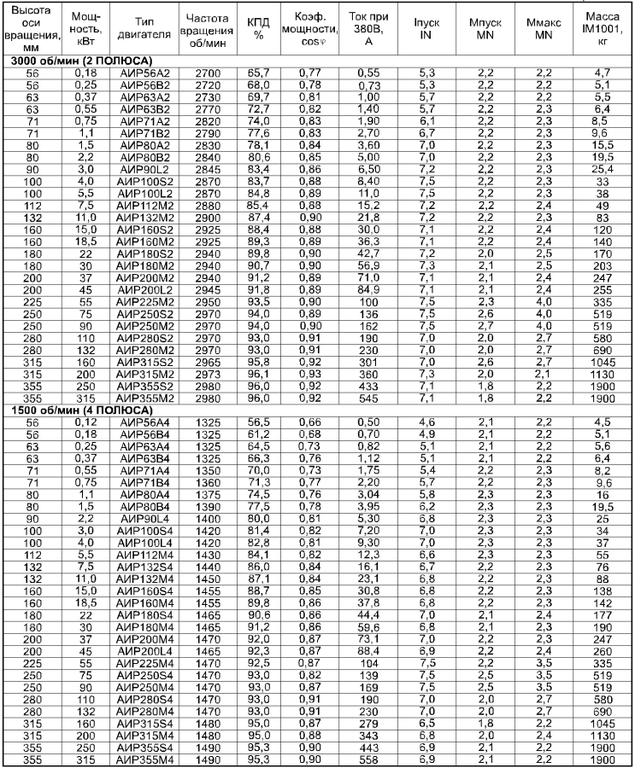
В: Где найти информацию по аксессуарам для автоматов-защиты двигателей M4?
О: См. раздел АКСЕССУАРЫ ДЛЯ МОТОР-АВТОМАТОВ BENEDICT? (блоки доп. контактов, контакты сигнализации срабатывания, расцепитель минимального напряжения, независимый расцепитель, перемычки и т.д.)
В: На какое конкретно значение должна выставляться уставка автомата защиты двигателя?
О: Уставка автоматического выключателя должна выставляться на значение номинального рабочего тока электродвигателя, указанное на шильдике (в паспорте).
В: Возможно ли использование автоматов защиты двигателя M4 для однофазных электродвигателей?
О: Да, возможно. В этом случае подключение должно осуществляться, как показано на рисунке:
В: Какую защиту обеспечивают автоматические выключатели M4?
1. Защита при возникновении токов короткого замыкания. Мгновенный расцепитель при возникновении короткого замыкания в нагрузке, обеспечивает отключение нагрузки от сети питания, таким образом предотвращая возникновение дополнительного ущерба от действия больших токов.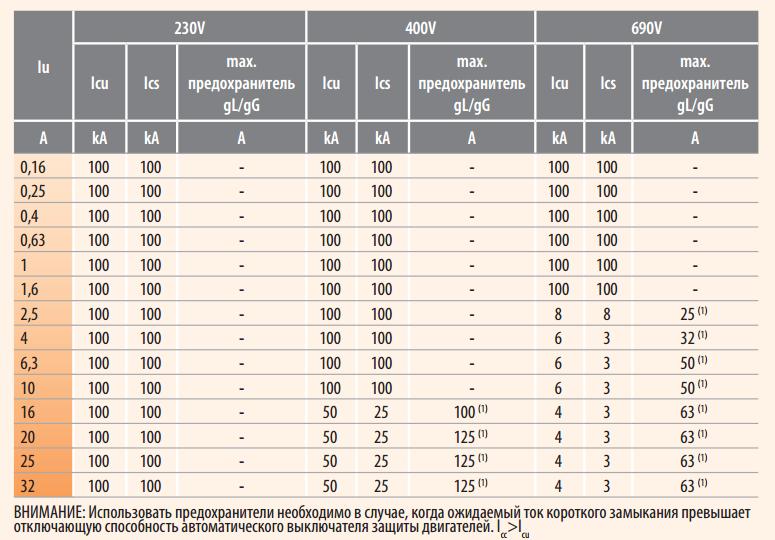 Автоматические выключатели M4 имеют отключающую способность 50кА и 100кА, что при напряжениях 380-400В AC является исчерпывающе надежной защитой, т.к. более высокие токи обычно не могут возникать в точке установки данного оборудования. В общем случае использование предохранителей не требуется, однако установка предохранителей дополнительно может производиться в тех случаях, когда ток короткого замкания в точке монтажа оборудования может превышать номинальную отключающую способность автоматического выключателя.
Автоматические выключатели M4 имеют отключающую способность 50кА и 100кА, что при напряжениях 380-400В AC является исчерпывающе надежной защитой, т.к. более высокие токи обычно не могут возникать в точке установки данного оборудования. В общем случае использование предохранителей не требуется, однако установка предохранителей дополнительно может производиться в тех случаях, когда ток короткого замкания в точке монтажа оборудования может превышать номинальную отключающую способность автоматического выключателя.
2. Защита двигателя. Характеристики срабатывания автоматических выключателей M4 специально разработаны для защиты трехфазных электродвигателей. Поэтому автоматические выключатели для защиты электродвигателей так же могут называться ручными пускателями двигателя. Номинальный ток защищаемого двигателя выбирается регулятором на лицевой панели устройства.
3. Защита сети. Автоматы защиты двигателя M4 так же обеспечивают защиту сети. Они соответствуют требованиям ГОСТ IEC 60947-3-2016 (Выключатели, разъединители, выключатели-разъединители и комбинации их с предохранителями) и ГОСТ IEC 60947-2-2014 (Аппаратура распределения и управления низковольтная).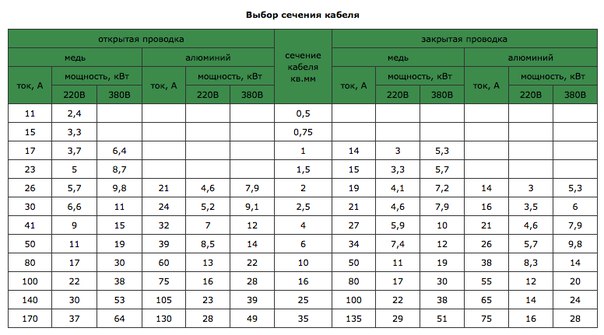 В соответствии с ГОСТ Р МЭК 60204-1-2007 данные автоматические выключатели могут быть использованы как основной или аварийной выключатель (следует учитывать, что в случае использования аксессуара для дверного сочленения не выполняются требования к изоляции).
В соответствии с ГОСТ Р МЭК 60204-1-2007 данные автоматические выключатели могут быть использованы как основной или аварийной выключатель (следует учитывать, что в случае использования аксессуара для дверного сочленения не выполняются требования к изоляции).
Характеристики срабатывания автоматических выключателей M4 для защиты электродвигателя:
I — Кривая показывает средний рабочий ток при температуре 20°С, если устройство было полностью охлаждено перед началом работы.
II — Кривая показывает характеристику мгновенного электромагнитного расцепителя (расцепление при к.з.)
Информация по аксессуарам для автоматов защиты двигателя M4
Какой выбрать автомат для асинхронного двигателя — Расчёты — Справочник
Расчет и выбор автоматического выключателя.
Автоматический выключатель (АВ) выбирают по номинальному току Iн.вык выключателя и номинальному току Iн. расц расцепителя.
расц расцепителя.
Iрасц=Iдл/Кт, где
Iдл=Iн.дв – длительный ток в линии,
Iн.дв – номинальный ток двигателя,
Кт – тепловой коэффициент, учитывающий условия установки АВ.
Кт=1 — для установки в открытом исполнении;
Кт=0,85 – для установки в закрытых шкафах.
Iдл=Iн= Рн/(Uн·√3·ηн·cosφ), (1)
гдеРн — мощность двигателя, кВт;
Uн – номинальное напряжение электродвигателя, кВ;
ηн – КПД двигателя (без процентов),
cosφ – коэффициент мощности двигателя.
Номинальный ток асинхронного двигателя с к. з. ротором будет примерно равен его удвоенной мощности, взятой в киловаттах:
Iн≈ 2Рн(кВт)
Выбираем АВ:
Тип –
Iн.вык –
Iрасц –
Проверка правильности выбора АВ по току мгновенного срабатывания.
Необходимо, чтобы выполнялось условие:
Iмгн.ср ≥ KIкр, где
Iмгн.ср — ток мгновенного срабатывания,
Iкр – максимальный кратковременный ток,
К – коэффициент, учитывающий неточность определения Iкр в линии.
К = 1,25 – для АВ с Iн > 100А;
К = 1,4 – для АВ с Iн ≤ 100А.
Iкр = Iпуск = Кi Iн, где
Кi – кратность пускового момента Кi = Iпуск/Iн.
Значения Кi берутся из таблиц.
Если условие выполняется, значит АВ выбран верно, если не выполняется, то выбирается АВ с большим значением тока расцепителя.
Приведем пример .
Дано:
Тип двигателя:
4А112М4У3
Условие установки АВ:
В шкафу.
Найти:
Тип АВ;
Iмгн.ср;
Iрасц.
Решение.
По типу двигателя выписываем из таблицы его номинальные данные:
Рн = 5,5 кВт; η = 85,5%=0,855; cosφ = 0,85; Iп/Iн = Кi = 7.
Iдл = Iн =Рн/√3Uнηcosφ = 5,5/√3∙0,38∙0,855∙0,85 = 11,5 A
Так как автомат устанавливается в шкафу, то Кт = 0,85, поэтому:
Iрасц = Iн/Кт = 11,5/0,85 = 13,5 А.
По току расцепителя выбираем автомат: ВА 51-25; Iн =25 А Iрасц = 16 А;
Проверка
Iмгн.ср≥ КIкр
Iмгн.ср = 10∙Iрасц = 10∙16 = 160 А
Iкр = Iпуск = Кi ∙Iн = 7∙11,5 = 80,5 А
К = 1,4
160 ≥ 1,4∙80,5 = 112,7 А
Неравенство выполняется, значит автомат выбран верно.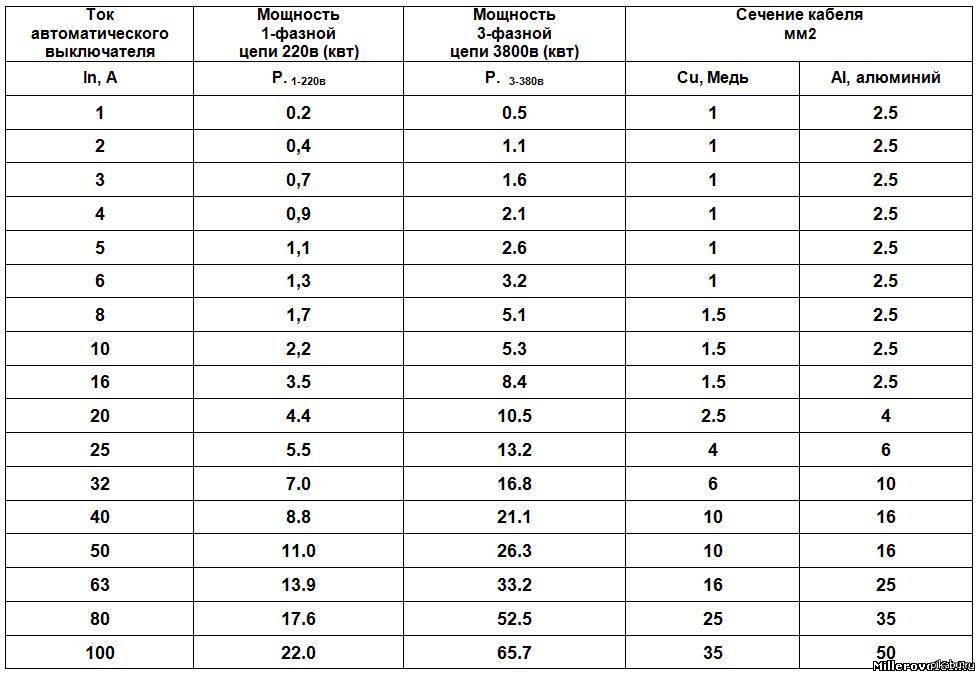
Как подобрать автоматический выключатель для двигателя
Правильный подбор автоматического выключателя для защити электродвигателя имеет огромное значение для оборудования. Надежность работы, защита двигателя от аварийных режимов работы и проводки напрямую зависит от подбора автоматического выключателя.
В этой статье наведем условия выбора автоматического выключателя для защиты электродвигателя. Для того чтобы выбрать автоматический выключатель необходимо знать:
— номинальный ток двигателя;
— кратность пускового тока к номинальному;
— максимально допустимый ток электропроводки.
Номинальный ток двигателя – это ток который имеет электродвигатель во время работы при номинальной мощности. Он указывается на паспорте электродвигателе или берется с таблиц паспортных данных электродвигателей.
Кратность пускового тока к номинальному – это соотношение пускового ток который возникает в электродвигателе во время пуска к номинальному. Он тоже указывается на паспорте электродвигателя или в таблицах электродвигателей.
Он тоже указывается на паспорте электродвигателя или в таблицах электродвигателей.
Максимально допустимый ток электропроводки – это допустимый ток, который может проходить по проводу, кабеля, что подключен к электродвигателю.
Условия для правильного выбора автоматического выключателя для защиты электродвигателя:
— номинальный ток автоматического выключателя должен бить больше или равен номинальному току электродвигателя. Например: ток электродвигателя АИР112М4У2 Ін. дв. =11,4А выбираем автоматический выключатель ВА51Г2534 на номинальный ток Ін. = 25А и ток расцепителя Ін..рас. = 12.5А.
После этого проверим автоматический выключатель на не срабатывания при пуске электродвигателя используя условие :
Iу.е.>kзап. · kр.у ·kр.п. ·Iн.дв ·kі
где Kзап . — коэффициент запаса, который учитывает колебания напряжения, Kзап . = 1,1 ;
kр.у — коэффициент, который учитывает неточность вставки по току срабатывания электромагнитного расцепителя автоматического выключателя , Kр. у = 1,2 ;
у = 1,2 ;
kр.п. — коэффициент, который учитывает возможное отклонение пускового тока от его номинального, kр.п. = 1,2 ;
K і — каталожная кратность пускового тока электродвигателя;
Iн.дв — номинальный ток двигателя , А.
Iу.е = 14 · Iн.рос = 14 · 12,5 = 175А
З таблицы электродвигателей находим K і = 7,0 для электродвигателя АИР112М4У2.
Подставляем в условие и определяем
175А > 1,1·1,2·1,2·7,0·11,4
175А > 126,4А
Условие выполнилось, следовательно, автоматический выключатель не сработает при запуске двигателя.
— номинальный ток автоматического выключателя должен быть меньше предельно допустимого тока кабеля которым питается электродвигатель. Например: подключение сделано кабелем АВРГ (3х2,5) который имеет допустимый ток Iдоп =27А. Для водного автомата для защиты электродвигателя условие выполняется потому, что Iдоп =27А > Ін. = 25А .
В этой статье вы узнали как правильно, используя условия выбора правильно подобрать автоматический выключатель для защиты электродвигателя.
Очень интересные публикации по этой теме:
Выбор автоматических выключателей для электродвигателей
Выбирая автоматические выключатели для защиты двигателей, мы должны учитывать, что при пуске электродвигателя, возникает пусковой ток, превышающий в 5 — 7 раз номинального значения.
Автоматические выключатели выбираются по условиям:
Uном. ≥ Uном.сети
где:
- Uном. – номинальное напряжение, В;
- Uном.сети – номинальное напряжение сети, В.
Iном.расц. ≥ Iном.дв.
где:
- Iном.расц. – номинальный ток расцепителя выключателя, А;
- Iном.дв. – номинальный ток электродвигателя, А.
Ток уставки электромагнитного и полупроводникового расцепителя выбирается по формуле [Л1,с. 106]:
Для приближенного расчета тока уставки электромагнитного и полупроводникового расцепителя, можно принять по таблице 6.1 [Л1,с. 107].
107].
Таблица 6.1 – Значения коэффициентов для расчета тока срабатывания отсечки автоматических выключателей, устанавливаемых в цепях электродвигателей
| Автоматический выключателиь | Расцепитель | kз | kа | kр | kн | ||
|---|---|---|---|---|---|---|---|
| А3700; А3790 | Полупроводниковый | РП | 1,1 | 1,0 | 1,3 | 1,5 | |
| ВА | БПР | ||||||
| «Электрон» | РМТ | 1,35 | 1,6 | ||||
| МТЗ-1 | 1,4 | 2,2 | |||||
| АВМ | Электромагнитный | 1,4 | 1,1 | 1,8 | |||
| А3110; АП-50; А3700; ВА; АЕ20 | 1,3 | 2,1 | |||||
| А3120; А3130; А3140 | 1,15 | 1,9 | |||||
Надежность срабатывания автомата при двухфазном и однофазном коротком замыкании при КЗ на выводах электродвигателя определяется коэффициентом чувствительности и рассчитывается по формуле [Л1,с.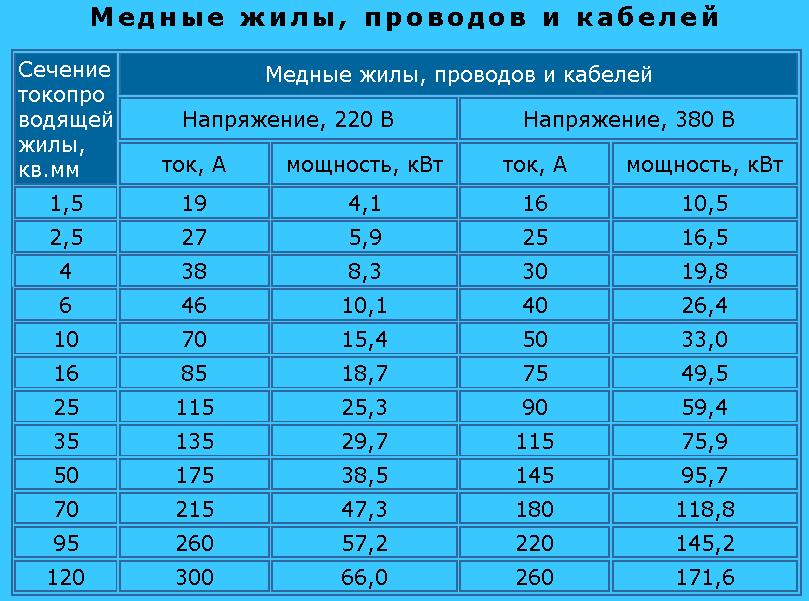 107]:
107]:
При отсутствии значений по коэффициенту разбросу kp, рекомендуется принимать коэффициент чувствительности в пределах 1,4-1,5.
В случае если чувствительности защиты от междуфазных КЗ недостаточно, следует принять следующие меры:
- уточнить значение Iс.о с учетом влияния сопротивления внешней сети на пусковой ток электродвигателя;
- выбрать другой тип АВ;
- увеличить сечение кабеля на одну, две ступени, но не больше;
- применить выносную релейную защиту.
При недостаточной чувствительности защиты от однофазных КЗ, следует принять следующие меры:
- применить кабель другой конструкции с нулевой жилой, алюминиевой оболочкой;
- проложить дополнительные зануляющие металлические связи;
- применить АВ со встроенной защитой от однофазных КЗ;
- применить выносную релейную защиту от однофазных КЗ, ток срабатывания данной защиты принимается 0,5-1*Iном.дв. Коэффициент чувствительности kч > 1,5, согласно ПУЭ 7-издание;
Выбор тока срабатывания для теплового и электромагнитного (комбинированного) расцепителя автоматического выключателя
Для того, чтобы защитить двигатель от перегрузки, то есть от повреждений, вызываемых длительным протеканием тока превышающего номинальный, нужно использовать тепловые и электромагнитные (комбинированные) расцепители. Номинальный ток теплового расцепителя определяется по формуле [Л1. с 109]:
Номинальный ток теплового расцепителя определяется по формуле [Л1. с 109]:
Данные коэффициенты определяются для разных типов выключателя по таблице 6.2 [Л1. с 112].
Таблица 6.2 – Значения коэффициентов для расчета тока срабатывания защиты от перегрузки автоматических выключателей
| Автоматический выключателиь | Расцепитель | kз | kр | kн = kз*kр | kв | |
|---|---|---|---|---|---|---|
| А3700; АЕ20 | Тепловой | — | — | 1,15 | 1 | |
| А3110; АП50 | 1,25 | 1 | ||||
| ВА51; ВА52 | 1,2-1,35 | 1 | ||||
| АВМ | Электромагнитный | 1,1 | 1,1 | 1,2 | 0,5-0,7 | |
| А3700 | Полупроводни- ковый | РП | 1,1 | 1,15-1,2 | 1,27-1,32 | 0,97-0,98 |
| «Электрон» | МТЗ-1, РМТ | 1,1 | 1,15-1,35 | 1,27-1,49 | 0,75 | |
| ВА | БПР | 1,1 | 1,08-1,2 | 1,19-1,32 | 0,97-0,98 | |
Общая формула по определению тока теплового расцепителя, имеет следующий вид:
Время срабатывания защиты от перегрузки выбирается из условия, что защита не будет срабатывать при пуске и самозапуске двигателя [Л1. с 112]:
с 112]:
Продолжительность пуска для двигателей с тяжёлыми условиями пуска, составляет более 5 – 10 сек, например для двигателей центрифуг, дробилок, шаровых мельниц и т.д и для двигателей с лёгкими условиями пуска равным 0,5 – 2 с, например для двигателей вентиляторов, насосов, главных приводов металлорежущих станков и механизмов с аналогичным режимом работы.
Проверка чувствительности при однофазных КЗ
Данную проверку нужно выполнять, если для отключения однофазных КЗ используется защита от перегрузки. В настоящее время ПУЭ 7-издание п. 1.7.79 предъявляет требования, чтобы время отключение выключателя тока однофазного КЗ не превышало 0,4 с.
Литература:
1. Беляев А.В. Выбор аппаратуры, защит и кабелей в сети 0,4 кВ. Учебное пособие. 2008 г.
Поделиться в социальных сетях
Расчет автоматического выключателя для электродвигателя
Автоматический выключатель для защиты электродвигателя — как правильно подобрать?
При подборе автоматических выключателей, способных защитить электрические моторы от повреждения в результате КЗ или чрезмерно высоких нагрузок, необходимо учитывать большую величину пускового тока, нередко превышающую номинал в 5-7 раз. Наиболее мощным стартовым перегрузкам подвержены асинхронные силовые агрегаты, обладающие короткозамкнутым ротором. Поскольку это оборудование широко применяется для работы в производственных и бытовых условиях, то вопрос защиты как самого устройства, так и питающего кабеля очень актуален. В этой статье речь пойдет о том, как правильно рассчитать и выбрать автомат защиты электродвигателя.
Наиболее мощным стартовым перегрузкам подвержены асинхронные силовые агрегаты, обладающие короткозамкнутым ротором. Поскольку это оборудование широко применяется для работы в производственных и бытовых условиях, то вопрос защиты как самого устройства, так и питающего кабеля очень актуален. В этой статье речь пойдет о том, как правильно рассчитать и выбрать автомат защиты электродвигателя.
Задачи устройств для защиты электродвигателей
Бытовую электротехнику от пусковых токов большой величины в сетях обычно защищают с помощью трехфазных автоматических выключателей, срабатывающих через некоторое время после того, как величина тока превысит номинальную. Таким образом, вал мотора успевает раскрутиться до нужной скорости вращения, после чего сила потока электронов снижается. Но защитные устройства, используемые в быту, не имеют точной настройки. Поэтому выбор автоматического выключателя, позволяющего защитить асинхронный двигатель от перегрузок и сверхтоков короткого замыкания, более сложен.
Современные автоматы для защиты двигателя нередко устанавливаются в общем корпусе с пускателями (так называются коммутационные устройства запуска мотора). Они предназначены для выполнения следующих задач:
- Защита устройства от сверхтока, возникшего внутри мотора или в цепи подачи электропитания.
- Предохранение силового агрегата от обрыва фазного проводника, а также дисбаланса фаз.
- Обеспечение временной выдержки, которая необходима для того, чтобы мотор, вынужденно остановившийся в результате перегрева, успел охладиться.
Управляющая и защитная автоматика для двигателя на видео:
- Отключение установки, если нагрузка перестала подаваться на вал.
- Защита силового агрегата от долгих перегрузок.
- Защита электромотора от перегрева (для выполнения этой функции внутри установки или на ее корпусе монтируются дополнительные температурные датчики).
- Индикация рабочих режимов, а также оповещение об аварийных состояниях.
Необходимо также учитывать, что автомат для защиты электродвигателя должен быть совместим с контрольными и управляющими механизмами.
Расчет автомата для электродвигателя
Еще недавно для защиты электрических моторов использовалась следующая схема: внутри пускателя устанавливался тепловой регулятор, подключенный последовательно с контактором. Этот механизм работал таким образом. Когда через реле в течение длительного времени проходил ток большой величины, происходил нагрев установленной в нем биметаллической пластины, которая, изгибаясь, прерывала контакторную цепь. Если превышение установленной нагрузки было кратковременным (как бывает при запуске двигателя), пластинка не успевала нагреться и вызвать срабатывание автомата.
Внутреннее устройство автомата защиты двигателя на видео:
Главным минусом такой схемы было то, что она не спасала агрегат от скачков напряжения, а также дисбаланса фаз. Сейчас защита электрических силовых установок обеспечивается более точными и современными устройствами, о которых мы поговорим чуть позже. А теперь перейдем к вопросу о том, как производится расчет автомата, который нужно установить в цепь электромотора.
Чтобы подобрать защитный автоматический выключатель для электроустановки, необходимо знать его времятоковую характеристику, а также категорию. Времятоковая характеристика от номинального тока, на который рассчитан АВ, не зависит.
Чтобы автоматический выключатель не срабатывал каждый раз при запуске мотора, величина пускового тока не должна быть больше той, которая вызывает моментальное срабатывание аппарата (отсечка). Соотношение тока запуска и номинала прописывается в паспорте оборудования, максимально допустимое – 7/1.
Соотношение тока запуска и номинала прописывается в паспорте оборудования, максимально допустимое – 7/1.
Производя расчет автомата практически, следует использовать коэффициент надежности, обозначаемый символом Kн. Если номинальный ток устройства не превышает 100А, то величина Kн составляет 1,4; для больших значений она равна 1,25. Исходя из этого, значение тока отсечки определяется по формуле Iотс ≥ Kн х Iпуск. Автоматический выключатель выбираем в соответствии с рассчитанными параметрами.
Еще одна величина, которую необходимо учитывать при подборе, когда автомат монтируется в электрощитке или специальном шкафу – температурный коэффициент (Кт). Это значение составляет 0,85, и номинальный ток защитного устройства при подборе следует умножать на него (In/Кт).
Современные устройства электрозащиты силовых агрегатов
Большой популярностью пользуются модульные мотор-автоматы, представляющие собой универсальные устройства, которые успешно справляются со всеми функциями, описанными выше.
Кроме этого, с их помощью можно производить регулировку параметров отключения с высокой точностью.
Современные мотор-автоматы представлены множеством разновидностей, отличающихся друг от друга по внешнему виду, характеристикам и способу управления. Как и при подборе обычного аппарата, нужно знать величину пускового, а также номинального тока. Кроме этого, надо определиться, какие функции должно выполнять защитное устройство. Произведя нужные расчеты, можно покупать мотор-автомат. Цена этих устройств напрямую зависит от их возможностей и мощности электрического мотора.
Особенности защиты электрических двигателей в производственных условиях
Нередко при включении устройств, мощность которых превышает 100 кВт, напряжение в общей сети падает ниже минимального. При этом отключения рабочих силовых агрегатов не происходит, но количество их оборотов снижается. Когда напряжение восстанавливается до нормального уровня, мотор начинает заново набирать обороты. При этом его работа происходит в режиме перегрузки. Это называется самозапуском.
Это называется самозапуском.
Самозапуск иногда становится причиной ложного срабатывания АВ. Это может произойти, когда до временного падения напряжения установка в течение длительного времени работала в обычном режиме, и биметаллическая пластина успела прогреться. В этом случае тепловой расцепитель иногда срабатывает раньше, чем напряжение нормализуется. Пример падения напряжения в электросети автомобиля на следующем видео:
Чтобы предотвратить отключение мощных заводских электромоторов при самозапуске, используется релейная защита, при которой в общую сеть включаются токовые трансформаторы. К их вторичным обмоткам подключаются защитные реле. Эти системы подбираются методом сложных расчетов. Приводить здесь мы их не будем, поскольку на производстве эту задачу выполняют штатные энергетики.
Заключение
В этом материале мы подробно осветили тему защитных устройств для электрических двигателей, и разобрались с тем, как подобрать автомат для электромотора и какие параметры при этом должны быть учтены. Наши читатели могли убедиться, что расчеты, которые производятся при этом, совсем несложны, а значит, подобрать аппарат для сети, в которую включен не слишком мощный силовой агрегат, вполне можно самостоятельно.
Для пуска, реверсирования, принудительной остановки противотоком асинхронных электродвигателей электрики используются контакторы и магнитные пускатели. От правильности выбора коммутационной аппаратуры зависит, как и безотказность системы в целом, так и электробезопасность обслуживающего персонала.
Выбор пускателя и избыточным коммутируемым током ведет к большим финансовым затратам, при его коммутации слышны шлепки большей громкости, чем те что издают маленькие пускатели. Недостаточные по коммутируемой мощности пускатели долго не прослужат, будут греться, и подгорать клеммники и контакты. В результате переходное сопротивление контакта будет расти до тех пор, пока контакт не исчезнет полностью, что приведет к преждевременной замене аппарата.
В результате переходное сопротивление контакта будет расти до тех пор, пока контакт не исчезнет полностью, что приведет к преждевременной замене аппарата.
Автоматические выключатели также должны быть правильно подобраны, особенно при тяжелом пуске двигателя. Слишком чувствительный автомат будет выбивать при пуске, а если он наоборот взят с излишним запасом по току, то в аварийной ситуации может и не отреагировать, что приведет к повреждению кабеля, обмотки двигателя вплоть до возгорания.
Пуск для электродвигателя сопровождается повышенным током в период разгона его до номинальных оборотов, в случае перегрузки и нехватки мощности двигателя для вращения исполнительных механизмов возможно пониженное число оборотов с повышенными токами, в плоть до того, что он вообще не начнет раскручиваться. И наоборот если мощность двигателя избыточна, то потребляемый им ток будет ниже номинального.
Из-за вышеперечисленных причин и появляется необходимость правильного подбора пусковой и защитной аппаратуры в виде магнитных пускателей, контакторов, тепловых реле и автоматических выключателей.
Автоматические выключатели устанавливаются до магнитного пускателя, чтобы в случае необходимости полностью обесточить систему, как силовую цепь, так и цепь управления (питания катушки).
Вместо автоматических выключателей могут использоваться плавкие вставки или предохранители, но в последнее время такие решения встречаются реже, чем раньше. Это усложняет обслуживание и вызывает необходимость иметь в запасе хотя бы комплект предохранителей.
Выбор магнитного пускателя
Магнитные пускатели выпускаются на определенный номинальный ток, из ряда: 6.3 – 10 – 25 – 40 – 63 – 100 – 160 – 250
Часто их разделяют не по токам, а по величинам от 0 до 7, чем больше ток (или величина пускателя) тем больше его габариты и площадь контактов. Опытный электромонтер может отличить по размеру корпуса, конструкции дугогасителя и габаритам контактных площадок примерный коммутируемые ток и напряжение.
Однако если номинальный ток пускателя соответствует току двигателя, это еще не значит, что их можно использовать в паре. Если такое понятие как категория применения, она характеризует режим работы коммутируемой аппаратуры, частоту
Как выбрать автомат по мощности нагрузки
Выбрать автомат по мощности нагрузки
Для выбора автомата по мощности нагрузки необходимо рассчитать ток нагрузки, и подобрать номинал автоматического выключателя больше или равному полученному значению. Значение тока, выраженное в амперах в однофазной сети 220 В., обычно превышает значение мощности нагрузки, выраженное в киловаттах в 5 раз, т.е. если мощность электроприемника (стиральной машины, лампочки, холодильника) равна 1,2 кВт., то ток, который будет протекать в проводе или кабеле равен 2,4 А(1,2 кВт*5=6,0 А). В расчете на 380 В., в трехфазных сетях, все аналогично, только величина тока превышает мощность нагрузки в 2 раза.
Можно посчитать точнее и посчитать ток по закону ома I=P/U — I=1200 Вт/220В =5,45А. Для трех фаз напряжение будет 380В.
Можно посчитать еще точнее и учесть cos φ — I=P/U*cos φ.
Коэффициент мощности — безразмерная физическая величина, характеризующая потребителя переменного электрического тока с точки зрения наличия в нагрузке реактивной составляющей. Коэффициент мощности показывает, насколько сдвигается по фазе переменный ток, протекающий через нагрузку, относительно приложенного к ней напряжения.
Численно коэффициент мощности равен косинусу этого фазового сдвига или cos φ
Косинус фи возьмем из таблицы 6.12 нормативного документа СП 31-110-2003 «Проектирование и монтаж электроустановок жилых и общественных зданий»
Значение Cos φ в зависимости от типа электроприемника
| Тип электроприемника | cos φ |
| Холодильное оборудование предприятий торговли и общественного питания, насосов, вентиляторов и кондиционеров воздуха при мощности электродвигателей, кВт: | |
| до 1 | 0,65 |
| от 1 до 4 | 0,75 |
| свыше 4 | 0,85 |
| Лифты и другое подъемное оборудование | 0,65 |
| Вычислительные машины (без технологического кондиционирования воздуха) | 0,65 |
| Коэффициенты мощности для расчета сетей освещения следует принимать с лампами: | |
| люминесцентными | 0,92 |
| накаливания | 1,0 |
| ДРЛ и ДРИ с компенсированными ПРА | 0,85 |
| то же, с некомпенсированными ПРА | 0,3-0,5 |
| газосветных рекламных установок | 0,35-0,4 |
Примем наш электроприемник мощностью 1,2 кВт. как бытовой однофазный холодильник на 220В, cos φ примем из таблицы 0,75 как двигатель от 1 до 4 кВт.
Рассчитаем ток I=1200 Вт / 220В * 0,75 = 4,09 А.
Теперь самый правильный способ определения тока электроприемника — взять величину тока с шильдика, паспорта или инструкции по эксплуатации. Шильдик с характеристиками есть почти на всех электроприборах.
Общий ток в линии(к примеру розеточной сети) определяется суммированием тока всех электроприемников. По рассчитанному току выбираем ближайший номинал автоматического автомата в большую сторону. В нашем примере для тока 4,09А это будет автомат на 6А.
Очень важно отметить, что выбирать автоматический выключатель только по мощности нагрузки является грубым нарушением требований пожарной безопасности и может привести к возгоранию изоляции кабеля или провода и как следствие к появлению пожара. Необходимо при покупке учитывать еще и сечение провода или кабеля.
По мощности нагрузки более правильно выбирать сечение проводника. Требования по выбору изложены в основном нормативном документе для электриков под названием Правила Устройства Электроустановок.В нашем случае, для домашней электросети, достаточно рассчитать ток нагрузки, как указано выше, и в таблице ниже выбрать сечение проводника, при условии что полученное значение ниже длительно допустимого тока соответствующего его сечению.
Выбор автомата по сечению кабеля
Рассмотрим проблему выбора автоматических выключателей для домашней электропроводки более подробно с учетом требований пожарной безопасности и.т.д. Необходимые требования изложены главе 3.1 «Защита электрических сетей до 1 кВ.», так как напряжение сети в частных домах, квартирах, дачах равно 220 или 380В.
Напряжение 220В. – однофазная сеть используется в основном для розеток и освещения.
380В. – это в основном сети распределительные – линии электропередач проходящие по улицам, от которых ответвлением подключаются дома.
Согласно требованиям вышеуказанной главы, внутренние сети жилых и общественных зданий должны быть защищены от токов КЗ и перегрузки. Для выполнения этих требований и были изобретены аппараты защиты под названием автоматические выключатели(автоматы).
Автоматический выключатель «автомат» — это механический коммутационный аппарат, способный включать, проводить токи при нормальном состоянии цепи, а также включать, проводить в течение заданного времени и автоматически отключать токи в указанном аномальном состоянии цепи, таких, как токи короткого замыкания и перегрузки.
Короткое замыкание (КЗ) — электрическое соединение двух точек электрической цепи с различными значениями потенциала, не предусмотренное конструкцией устройства и нарушающее его нормальную работу. Короткое замыкание может возникать в результате нарушения изоляции токоведущих элементов или механического соприкосновения неизолированных элементов. Также, коротким замыканием называют состояние, когда сопротивление нагрузки меньше внутреннего сопротивления источника питания.
Ток перегрузки – превышающий нормированное значение длительно допустимого тока и вызывающий перегрев проводника.Защита от токов КЗ и перегрева необходима для пожарной безопасности, для предотвращения возгорания проводов и кабелей, и как следствие пожара в доме.
Длительно допустимый ток – величина тока, постоянно протекающего по проводнику, и не вызывающего чрезмерного нагрева провода или кабеля.
Величина длительно допустимого тока для проводников разного сечения и материала представлена ниже.Таблица представляет собой совмещенный и упрощенный вариант применимый для бытовых сетей электроснабжения, таблиц № 1.3.6 и 1.3.7 ПУЭ.
| Сечение токо- проводящей жилы, мм | Длительно допустимый ток, А, для проводов и кабелей с медными жилами. | Длительно допустимый ток, А, для проводов и кабелей с алюминиевыми жилами. |
| 1,5 | 19 | — |
| 2,5 | 25 | 19 |
| 4 | 35 | 27 |
| 6 | 42 | 32 |
| 10 | 55 | 42 |
| 16 | 75 | 60 |
| 25 | 95 | 75 |
| 35 | 120 | 90 |
| 50 | 145 | 110 |
Выбор автомата по току короткого замыкания КЗ
Выбор автоматического выключателя для защиты от КЗ (короткого замыкания) осуществляется на основании расчетного значения тока КЗ в конце линии. Расчет относительно сложен, величина зависит от мощности трансформаторной подстанции, сечении проводника и длинны проводника и т.п.
Из опыта проведения расчетов и проектирования электрических сетей, наиболее влияющим параметром является длинна линии, в нашем случае длинна кабеля от щитка до розетки или люстры.
Т.к. в квартирах и частных домах эта длинна минимальна, то такими расчетами обычно пренебрегают и выбирают автоматические выключатели с характеристикой «C», можно конечно использовать «В», но только для освещения внутри квартиры или дома, т.к. такие маломощные светильники не вызывают высокого значения пускового тока, а уже в сети для кухонной техники имеющей электродвигатели, использование автоматов с характеристикой В не рекомендуется, т.к. возможно срабатывание автомата при включении холодильника или блендера из-за скача пускового тока.
Выбор автомата по длительно допустимому току(ДДТ) проводника.
Выбор автоматического выключателя для защиты от перегрузки или от перегрева проводника осуществляется на основании величины ДДТ для защищаемого участка провода или кабеля. Номинал автомата должен быть меньше или равен величине ДДТ проводника, указанного в таблице выше. Этим обеспечивается автоматическое отключение автомата при превышении ДДТ в сети, т.е. часть проводки от автомата до последнего электроприемника защищена от перегрева, и как следствие от возникновения пожара.
Пример выбора автоматического выключателя
Имеем группу от щитка к которой планируется подключить посудомоечную машину -1,2 кВт, кофеварку – 0,6 кВт и электрочайник – 2,0 кВт.
Считаем общую нагрузку и вычисляем ток.
Нагрузка = 0,6+1,6+2,0=4,2 кВт. Ток = 4,2*5=21А.
Смотрим таблицу выше, под рассчитанный нами ток подходят все сечения проводников кроме 1,5мм2 для меди и 1,5 и 2,5 по алюминию.
Выбираем медный кабель с жилами сечением 2,5мм2, т.к. покупать кабель большего сечения по меди не имеет смысла, а алюминиевые проводники не рекомендуются к применению, а может и уже запрещены.
Смотрим шкалу номиналов выпускаемых автоматов — 0.5; 1.6; 2.5; 1; 2; 3; 4; 5; 6; 8; 10; 13; 16; 20; 25; 32; 40; 50; 63.
Автоматический выключатель для нашей сети подойдет на 25А, так как на 16А не подходит потому что рассчитанный ток (21А.) превышает номинал автомата 16А, что вызовет его срабатывание, при включении всех трех электроприемников сразу. Автомат на 32А не подойдет потому что превышает ДДТ выбранного нами кабеля 25А., что может вызвать, перегрев проводника и как следствие пожар.
Сводная таблица для выбора автоматического выключателя для однофазной сети 220 В.
| Номинальный ток автоматического выключателя, А. | Мощность, кВт. | Ток,1 фаза, 220В. | Сечение жил кабеля, мм2. |
| 16 | 0-2,8 | 0-15,0 | 1,5 |
| 25 | 2,9-4,5 | 15,5-24,1 | 2,5 |
| 32 | 4,6-5,8 | 24,6-31,0 | 4 |
| 40 | 5,9-7,3 | 31,6-39,0 | 6 |
| 50 | 7,4-9,1 | 39,6-48,7 | 10 |
| 63 | 9,2-11,4 | 49,2-61,0 | 16 |
| 80 | 11,5-14,6 | 61,5-78,1 | 25 |
| 100 | 14,7-18,0 | 78,6-96,3 | 35 |
| 125 | 18,1-22,5 | 96,8-120,3 | 50 |
| 160 | 22,6-28,5 | 120,9-152,4 | 70 |
| 200 | 28,6-35,1 | 152,9-187,7 | 95 |
| 250 | 36,1-45,1 | 193,0-241,2 | 120 |
| 315 | 46,1-55,1 | 246,5-294,7 | 185 |
Сводная таблица для выбора автоматического выключателя для трехфазной сети 380 В.
| Номинальный ток автоматического выключателя, А. | Мощность, кВт. | Ток, 1 фаза 220В. | Сечение жил кабеля, мм2. |
| 16 | 0-7,9 | 0-15 | 1,5 |
| 25 | 8,3-12,7 | 15,8-24,1 | 2,5 |
| 32 | 13,1-16,3 | 24,9-31,0 | 4 |
| 40 | 16,7-20,3 | 31,8-38,6 | 6 |
| 50 | 20,7-25,5 | 39,4-48,5 | 10 |
| 63 | 25,9-32,3 | 49,2-61,4 | 16 |
| 80 | 32,7-40,3 | 62,2-76,6 | 25 |
| 100 | 40,7-50,3 | 77,4-95,6 | 35 |
| 125 | 50,7-64,7 | 96,4-123,0 | 50 |
| 160 | 65,1-81,1 | 123,8-124,2 | 70 |
| 200 | 81,5-102,7 | 155,0-195,3 | 95 |
| 250 | 103,1-127,9 | 196,0-243,2 | 120 |
| 315 | 128,3-163,1 | 244,0-310,1 | 185 |
| 400 | 163,5-207,1 | 310,9-393,8 | 2х95* |
| 500 | 207,5-259,1 | 394,5-492,7 | 2х120* |
| 630 | 260,1-327,1 | 494,6-622,0 | 2х185* |
| 800 | 328,1-416,1 | 623,9-791,2 | 3х150* |
* — сдвоенный кабель, два кабеля соединенных паралельно, к примеру 2 кабеля ВВГнг 5х120
Схема регулятора скорости трехфазного асинхронного двигателя
В этом посте мы обсудим создание простой схемы регулятора скорости трехфазного асинхронного двигателя, которая также может применяться для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока.
Когда дело доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных каскадов, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. Д.
Все они используются для достижения в конечном итоге прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что в конечном итоге обеспечивает необходимое управление скоростью двигателя.
Тем не менее, мы можем поэкспериментировать и попытаться реализовать управление скоростью трехфазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные ИС оптопары детектора перехода через нуль, силовой симистор и схему ШИМ.
Использование детектора перехода через ноль Оптопара
Благодаря серии оптопар MOC, которые сделали схемы управления симисторами чрезвычайно безопасными и простыми в настройке, а также обеспечивают беспроблемную интеграцию PWM для предполагаемых элементов управления.
В одном из своих предыдущих постов я обсуждал простую схему контроллера двигателя с плавным пуском с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для обеспечения соблюдения предлагаемой схемы регулятора скорости трехфазного асинхронного двигателя, на следующем изображении показано, как это можно сделать:
На рисунке мы видим три идентичных каскада оптопары MOC, сконфигурированных в их стандартном симисторе. режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
Три контура MOC сконфигурированы для обработки входного трехфазного переменного тока и подачи его на подключенный асинхронный двигатель.
Вход ШИМ на стороне управления изолированными светодиодами оптического блока определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что, регулируя потенциометр ШИМ, связанный с ИС 555, можно эффективно управлять скоростью асинхронного двигателя.
Выход на его выводе №3 имеет переменный рабочий цикл, который, в свою очередь, соответственно переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение среднеквадратичного значения с помощью более широких ШИМ позволяет достичь более высокой скорости двигателя, в то время как снижение среднеквадратичного значения переменного тока с помощью более узких ШИМ вызывает противоположный эффект, то есть вызывает пропорциональное замедление двигателя.
Вышеупомянутые функции реализованы с большой точностью и безопасностью, так как ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, твердотельные реле и т. Д.
IC также обеспечивает идеально изолированную работу для каскада постоянного тока, что позволяет пользователю выполнять настройки, не опасаясь поражения электрическим током.
Этот принцип можно также эффективно использовать для управления скоростью однофазного двигателя, используя одну MOC IC вместо 3.
Конструкция фактически основана на теории пропорционального по времени симистора. Верхняя схема ШИМ IC555 может быть отрегулирована для обеспечения рабочего цикла 50% при гораздо более высокой частоте, в то время как нижняя схема ШИМ может использоваться для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта микросхема 555 имела относительно более низкую частоту, чем схема верхней микросхемы IC 555. Это можно сделать, увеличив емкость конденсатора на выводе 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗОВЫМИ ПРОВОДАМИ МОЖЕТ Существенно улучшить ХАРАКТЕРИСТИКИ УПРАВЛЕНИЯ СКОРОСТЬЮ СИСТЕМЫ.
Datasheet для MOC3061
Предполагаемая форма волны и управление фазой с использованием вышеуказанной концепции:
Вышеописанный метод управления трехфазным асинхронным двигателем на самом деле довольно груб, поскольку он не имеет контроля В / Гц .
Он просто использует включение / выключение сети с разной скоростью для выработки средней мощности двигателя и управления скоростью, изменяя этот средний переменный ток двигателя.
Представьте, что вы включаете / выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Вышеупомянутый принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В / Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.
Для этого мы в основном используем следующие этапы:
- Н-мостовой или полный мост IGBT-драйвер Схема
- Трехфазный генераторный каскад для питания полной мостовой схемы
- В / Гц ШИМ-процессор
Использование полного моста Схема управления IGBT
Если процедуры настройки вышеупомянутой конструкции на основе симистора кажутся вам пугающими, можно попробовать следующее управление скоростью асинхронного двигателя на основе полномостового ШИМ:
В схеме, показанной на приведенном выше рисунке, используется один полный кристалл. -мостовой драйвер IC IRS2330 (последняя версия — 6EDL04I06NT), который имеет все встроенные функции для обеспечения безопасной и идеальной работы трехфазного двигателя.
ИС требуется только синхронизированный трехфазный логический вход через его выводы HIN / LIN для генерации необходимого трехфазного колебательного выхода, который, наконец, используется для работы полной мостовой IGBT-сети и подключенного трехфазного двигателя.
ШИМ-инжектор с регулировкой скорости реализуется через 3 отдельных полумостовых каскада драйверов NPN / PNP, управляемых с помощью SPWM-питания от генератора ШИМ IC 555, как показано в наших предыдущих проектах. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала разберемся, как автоматическое регулирование В / Гц может быть достигнуто с помощью нескольких схем IC 555, как описано ниже.
Схема автоматического ШИМ-процессора (Замкнутый контур)
В вышеуказанных разделах мы изучили конструкции, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В / Гц, если не будет следующая ШИМ процессор интегрирован с входным каналом H-Bridge PWM.
Вышеупомянутая схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе № 6 IC2 с помощью R4 / C3.
Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 IC2. Эти пульсации образца получаются путем выпрямления трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на контакт № 5 IC2 для необходимой обработки.
Путем сравнения двух сигналов, SPWM соответствующего размера генерируется на выводе № 3 IC2, который становится управляющим ШИМ для сети H-моста.
Как работает схема В / Гц
При включении питания конденсатор на выводе №5 начинает с передачи нулевого напряжения на выводе №5, которое вызывает наименьшее значение SPWM в Н-мостовой схеме, которая, в свою очередь, включает асинхронный двигатель для запуска с медленным плавным пуском.
По мере зарядки этого конденсатора потенциал на выводе № 5 повышается, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость.
Мы также можем видеть цепь обратной связи тахометра, которая также интегрирована с контактом № 5 микросхемы IC2.
Этот тахометр контролирует скорость ротора или скорость скольжения и генерирует дополнительное напряжение на контакте № 5 IC2.
Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора, и в процессе она начинает набирать скорость.
Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выход SPWM, что, в свою очередь, дополнительно увеличивает скорость двигателя.
Вышеупомянутая регулировка пытается поддерживать отношение В / Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет увеличиваться дальше.
В этот момент скорость скольжения и скорость статора достигают установившегося состояния, и это поддерживается до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся. В случае их изменения схема процессора В / Гц снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
Тахометр
Цепь тахометра также может быть дешево построена с использованием следующей простой схемы и интегрирована с описанными выше этапами схемы:
Как реализовать контроль скорости
В предыдущих абзацах мы поняли процесс автоматического регулирования, который может eb достигается за счет интеграции обратной связи тахометра в цепь автоматического регулируемого контроллера SPWM.
Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM упасть и поддерживать правильное соотношение В / Гц.
Следующая диаграмма поясняет каскад управления скоростью:
Здесь мы можем увидеть схему трехфазного генератора с использованием микросхемы IC 4035, частота сдвига фаз которой может быть изменена путем изменения тактового сигнала на его выводе №6.
3-фазные сигналы подаются на логические элементы 4049 IC для создания требуемых HIN, LIN-каналов для полной мостовой сети драйверов.
Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя.
Это реализуется через простую нестабильную схему IC 555, которая подает регулируемую частоту на вывод № 6 IC 4035 и позволяет регулировать частоту через подключенный потенциометр 100K. Конденсатор C должен быть
Моделирование индукционной электрической машины в системе отсчета трехфазного статора: подход и результаты
1.Введение
Асинхронный двигатель (IM) играет очень важную роль в промышленности и на транспорте, прежде всего благодаря своей прочности и низкой стоимости. Есть авторы, которые посвящают свои публикации задачам математического моделирования ИМ [1, 2, 3, 4, 5, 6]. Автор хочет предложить свою версию математической модели (ММ) ИМ, подходящую для несбалансированных режимов моделирования.
Запись уравнений ММ трехфазного АД в системе отсчета трехфазного статора (SRF) полезна при анализе, сравнивая расчетные и фактические кривые токов и фазных напряжений, подходящие без дополнительного преобразования уравнений для учет режимов работы АД при несимметричных характеристиках питания или параметрах АД.Результаты моделирования для координат α, β, γ соответствуют реальным процессам в фазах A, B и C статора в случае короткозамкнутого ротора, т.е. в большинстве случаев только и могут быть измерены экспериментально. Имитационное моделирование в трехфазных координатах полезно для обнаружения и диагностики дефектов статора [3] и реализации алгоритмов прямого управления крутящим моментом.
Можно утверждать — при условии только рассмотрения, основные пространственные гармоники магнитного поля в воздушном зазоре симметричны в конструктивном трехфазном IM, питающемся от несимметричной системы несинусоидальных напряжений, — что результаты моделирования будут правильными, а вот того же в двухфазных ортогональных координатах не будет.
2. Уравнения математической модели
Предлагаемый ММ трехфазного ИД основан на ММ трехфазной электрической машины с осями системы координат SRF α, β, γ [5], которые совмещены с фазовыми осями статора. A, B и C. Этот базовый ММ дополнен сопротивлениями потерь в стали rμ, включенными в цепи намагничивания в каждой фазе ИД параллельно с индуктивностью намагничивания Lμ [6] (аналогия с Т-образной схемой замещения индукционной электрической машины). Уравнения электромагнитных процессов в ИМ приведены в формуле.(1), принятые на основе обычных обобщенных допущений электрических машин: каждая из фазных обмоток статора создает в гладком воздушном зазоре синусоидально распределенную магнитодвижущую силу; коэффициент магнитного насыщения постоянный. В выражениях (уравнение (1)) далее приняты следующие обозначения: v — напряжение; i, ток; t, время; r — сопротивление; Ψ, магнитопровод; ωr — механическая частота вращения ротора; и p — количество пар полюсов. Нижние индексы α, β, γ указывают на принадлежность к соответствующей фазе.Нижний индекс указывает на принадлежность статору, индекс r относится к ротору, а индекс μ — к ветви намагничивания. Lσsα — индуктивность рассеяния фазы статора; Lσrα — индуктивность рассеяния фазы обмотки ротора.
Традиционно параметры ротора задаются обмотке статора. Подробные компоненты системы (уравнение (1)) описаны в уравнениях. (2) — (7). Форма уравнения. (1) максимально унифицировано с опубликованными уравнениями (уравнение (1)) трехфазного трансформатора MM [7]:
vsα = rsαisα + dLσsαisαdt + v0α; iμα_active = v0αrμα; vsβ = rsβisβ + dLσsβisβdt + v0β; iμβ_active = v0βrμβ; vsγ = rsγisγ + dLσsγisγdt + v0γ; iμγ_active = v0γrμγ; vrα = e0α − erotα − dLσrαirαdt − rrαirα; vrβ = e0β − erotβr − dLγLβγ3 · rγ3γ3 · rγ3 · rtγ3 · rtγ3 ··· r · rtγ3
Напряжения на выводах ветвей фазовой намагниченности (полученные из потокосцепления взаимной индукции)
v0α = dΨμαdt = rμαisα + irα − 12isβ + irβ + isγ + irγ − ΨμαM;
v0β = dΨμβdt = rμβisβ + irβ − 12isα + irα + isγ + irγ − ΨμβM; E2
v0γ = dΨμγdt = rμγisγ + irγ − 12isα + irα + isβ + irβ − ΨμγM.
Взаимная индуктивность обмоток АД определяется как
М = 2 / 3LμE3
М — взаимная индуктивность фазных обмоток ротора и статора АД при совпадении их осей. Другими словами, основная индуктивность обмотки статора при расчете магнитного потока при отсутствии токов в других фазах обмоток статора и ротора (т.е.из части основного магнитного потока, создаваемого самой фазой статора).
Lμ — полная фазная индуктивность обмотки статора от основного магнитного потока, учитывающая наличие токов в других фазах.Другими словами, индуктивность части основного магнитного потока создается самой обмоткой M, а индуктивность части основного магнитного потока создается двумя другими обмотками статора M / 2.
Пофазные токи намагничивания:
iμα = isα + irα = 23isα − 12isβ + isγ + irα − 12irβ + irγ = iμα_active + iμα_reactive;
iμβ = isβ + irβ = 23isβ − 12isα + isγ + irβ − 12irα + irγ = iμβ_active + iμβ_reactive; E4
iμγ = isγ + irγ = 23isγ − 12isα + isβ + irγ − 12irα + irβ = iμγ_reactive + iμγ_активный + iμγ.
В выражениях (ур.(4)), iμ_active и iμ_reactive — это активная и реактивная (индуктивная) составляющие пофазного тока намагничивания соответственно.
e0α = −v0α; e0β = −v0β; e0γ = −v0γ.E5
erotα = Ψrβ − Ψrγpωr3; erotβ = Ψrγ − Ψrαpωr3; erotγ = Ψrα − Ψrβpωr3; erotγ = Ψrα − Ψrβpω3 фаза
Fluke
. Ψrα = Lσrαirα + Ψμα; Ψrβ = Lσrβirβ + Ψμβ; Ψrγ = Lσrγirγ + Ψμγ.E7
Электромагнитный крутящий момент уравнения IM составляет
Tem = p32Misαirγ + isβirα + isγ8γ2β − isβirα + isγ8γ движение вала АД в случае одномассовой механической части:
dωrdt = 1JTem − Tload, E9
, где J — момент инерции масс, сцепляющихся с валом ротора, а Tload — статический момент сцепления механической нагрузки с Вал IM.
В общем случае уравнение. (9) можно записать в виде
dωrdt = 1JTem − TloadtωrΘr = TdynamicJ, E10
Tdynamic — динамический момент на валу ИД;
ωr = ωr0 + ∫0tTdynamicJdt, E11
ωr0 — начальная угловая скорость вала ротора ИД.
Угол поворота вала ротора АД, радиан
Θr = Θr0 + ∫0tωrdt, E12
Θr0 — начальное угловое положение вала ротора АД, радиан.
Интересно узнать энергоэффективность электрической машины в переходном процессе.Для IM при отсутствии мощности от ротора мгновенное значение потребляемой активной мощности рассчитывается как
P1 = vsαisα + vsβisβ + vsγisγ.E13
Мгновенное потребление реактивной мощности
Q1 = −13vsαisβ − isγ + vsβisγ − isα + vsγisα − isβ.E14
Мгновенное значение полезной мощности на валу IM
P2 = ωrTload.E15
Вышеупомянутые уравнения (уравнения (1) — (15)) IM MM могут быть дополнены выражениями ( Уравнение (16)), позволяющие перейти к описанию фазных токов ротора на частоте f2 = s⋅f1, где s — спящий режим ротора, а f1 — частота напряжения статора.
ira = irα13 + 23cosp⋅Θr + irβ13 + 23cosp⋅Θr − 2π3 + irγ13 + 23cosp⋅Θr + 2π3;
irb = irα13 + 23cosp⋅Θr + 2π3 + irβ13 + 23cosp⋅Θr + irγ13 + 23cosp⋅Θr − 2π3; E16
irc = irα13 + 23cosp⋅Θr − 2π3 + irβ13 + 23cosp⋅Θr + 2π3 + irγ13 + 23cosp⋅Θr .
Такое представление токов ротора демонстрирует характер изменения переходных процессов (см. Рисунок 1, на котором показаны результаты моделирования фазных токов ротора в случае симметричных синусоидальных напряжений источника питания для ИД типа АЭ92-4, 4 -полюс, 40 кВт).На рис. 1 кривая 1 — это irγ-ток, кривая 2 — безоток, а кривая 3 — скорость ротора. По частоте f2 можно проверить значение частоты вращения ротора ИД.
Рисунок 1.
Результаты моделирования фазного тока ротора для IM типа AE92-4.
На рис. 2 показана возможность применения разработанного ММ для моделирования электромагнитных и электромеханических процессов в АД с питанием его от силового полупроводникового преобразователя — автономного инвертора напряжения.
Рисунок 2.
Результаты моделирования тягового ИД типа ДТА-350М (6-полюсный, 350 кВт) при питании от режима автономного инвертора напряжения.
3. Требования к компьютерной модели
В процессе компьютерной модели ИМ по уравнениям (Уравнения (1) — (12)) разработка с использованием OrCAD — системы автоматизированного проектирования, предназначенной в первую очередь для При проектировании и моделировании электронных и электрических устройств [8] стояла задача обеспечить встроенную модель ИД в цепь электропитания, включая преобразователи, путем простого подключения виртуальных терминалов.То есть по отношению к модели электрической цепи, которая присоединена к этой цепи, модель IM должна также обладать свойствами электрических цепей: на клеммы можно подавать разность потенциалов, обеспечивая двунаправленный электрический ток в соединительных цепях, включая сквозной ток между ними. Другой задачей является формирование такой структуры компьютерной модели, которая, возможно, будет использоваться как универсальный шаблон, в который записываются значения переменных (параметров ИМ), запрашиваемые одновременно для всех уравнений.Полученная компьютерная модель пригодна для описания как беличьей клетки, так и ИД ротора в любом из четырех квадрантов. Фазы обмотки могут быть соединены по схеме треугольник, звезда, независимо соединены с каждым своим напряжением, чтобы иметь любую другую проводку друг с другом или с источником питания. Разработанная компьютерная модель дает пользователю доступ к началу и концу обмотки каждой из трех фаз статора и ротора. Это свойство особенно важно при рассмотрении асимметричных режимов работы или при питании от специальной схемы полупроводниковых преобразователей [9].
4. Реализация компьютерной модели
Поставленные задачи решаются путем объединения двух подходов при разработке компьютерной модели ИД: схемы электрической части и метода блок-схем магнитной и механической частей. Компьютерная модель IM упакована в иерархический блок с заданным списком переменных (параметров IM). В рамках одного проекта OrCAD с помощью операции копирования можно получить необходимое количество иерархических блоков (моделей IM), для каждого из которых можно задать уникальные значения параметров.Датчики и сигнальные входы в модели IM используют контролируемые источники токов и напряжений. Такой источник напряжения управляется током (VSCC) и напряжением (VSCV), а источник тока управляется напряжением (CSCV). Графическое изображение компьютерной модели фаз , обмоток статора и ротора АД, составленное из формул. (1) — (7), показано на рисунке 3.
Рисунок 3.
Графическое изображение компьютерной модели фазы А обмоток статора и ротора ИД.
VSCC1 выполняет функцию датчика фазного тока статора; Аналогично, VSCC2 — это датчик фазного тока ротора, подаваемого на обмотку статора. CSCV1 используется для ввода irα в схему. VSCV1 вводится в цепь намагничивания фазы v0αvoltage. Аналогичную функцию выполняет ВСКВ2, входящий в цепь обмотки ротора; разница между электродвижущей силой ветви намагничивания и электродвижущей силой вращения, то есть величиной падения напряжения.Активные сопротивления rserv (см. Рисунок 3) имеют большое значение, например 10 МОм. Эти резисторы предназначены для сервисных целей. Не влияя на результаты численных расчетов, они стабилизируют решение (моделирование), поддерживая цепь тока (физический смысл — путь тока утечки), что особенно важно, когда происходит дискретное изменение сопротивления цепи IM, например, при питании от преобразователя частоты или в случае обрыва цепи фаз.Аналогичное решение описано в [10].
Остальные уравнения математической модели трехфазной ИМ реализованы автором в компьютерной модели в виде блок-схем [11]. На рис. 4 показана часть модели, в которой из основного магнитного потока в относительных единицах получается мгновенное значение Lμ ∗ — полной фазной индуктивности обмотки статора. ΜΣmrated — номинальное значение μΣm — мгновенное значение амплитуды представляющего вектора потокосцепления взаимной индукции.
Рисунок 4.
Блок-схема для получения мгновенных значений полной фазной индуктивности обмотки статора из основного магнитного потока в относительных единицах L μ ∗.
Сигнал ΨμΣm можно рассчитать как
ΨμΣm = Ψμx2 + Ψμy2, E17
где Ψμx и andμy — проекции представляющего вектора потокосцепления взаимной индукции на ортогональные оси координат X и Y. В случае трехфазного статора В системе отсчета оси системы координат эти проекции выводятся из взаимно индукционных потоковых связей каждой фазы.
Ψμx = 23Ψμα + Ψμβcos − 2π3 + Ψμγcos2π3; E18
Ψμy = −23Ψμβsin − 2π3 + Ψμγsin2π3.E19
На рисунке 5 показана кусочно-линейная аппроксимация пятью точками Lμ50 μV для полюса Lμ50 , 110 кВт). Такой способ, успешно апробированный в имитаторе IM, разработан с помощью OrCAD PSpice [8]: одна стандартная таблица компонентов используется для программирования вышеупомянутой приближенной зависимости.
Рисунок 5.
Кусочно-линейная аппроксимация пятью точками L μ ∗ Ψ μ Σ m ∗ для IM типа AGV250.
На рисунке 6 представлена часть модели, соответствующая приведенным выше (уравнения (1) — (3)) уравнениям. На рисунке 7 показана часть модели IM, предназначенная для определения электродвижущей силы вращения в каждой фазе. Модельная частота вращения ротора ωr_modelin ptimes выше реальной механической скорости вращения ротора ωr. На рисунке 8 показана часть модели IM, соответствующая уравнениям (уравнение (2)). На рис. 9 показана часть модели, формирующая сигналы электромагнитного момента Tem, угловой скорости ωr и угла поворота Θ ротора.На рисунке 9 показана механическая угловая скорость ротора, обороты в минуту.
Рисунок 6.
Блок-схема, реализующая вычисление мгновенного значения амплитуды представляющего вектора потокосцепления взаимной индукции.
Рисунок 7.
Часть модели IM, предназначенная для определения электродвижущей силы вращения в каждой фазе.
Рисунок 8.
Блок-схемы, соответствующие уравнениям (уравнение (2)).
Рисунок 9.
Блок-схемы, формирующие сигналы электромагнитного момента T em, угловой скорости ω r и угла поворота ротора Θ r.
5. Пример использования математической модели двигателя при несимметричном напряжении питания
Хорошим примером функциональности ранее предоставленного ММ при несимметричном напряжении питания может быть моделирование электромеханического фазоделителя, выполненного на основе трех -фазный IM.
Электромеханические фазоделители используются в России и Индии [12] на борту электропоездов и электровозов для преобразования однофазного переменного напряжения в трехфазное напряжение для питания вспомогательных электроприводов с АД, нагружаемых вентиляторами и воздушными компрессорами.На рисунке 10 представлена принципиальная схема вращающегося фазоделителя, где С1 — рабочая, С2 — пусковая мощность.
Рисунок 10.
Принципиальная схема вращающегося фазоделителя.
Фазоделители представляют собой IM с симметричной или несимметричной обмоткой статора и без нагрузки (или небольшой нагрузки) на валу. Фазоделитель можно рассматривать как комбинированный однофазный ИД и трехфазный синхронный генератор. В соответствии с принятой в Индии терминологией, фазоделитель называется преобразователем ARNO [12].
На современных грузовых электровозах переменного тока семейства «Ермак» в России в качестве фазоразделителя используется ИМ типа НВА-55 (4-полюсный, 55 кВт). Для привода вентиляторов и компрессора используется один и тот же тип IM. Сделаем моделирование пуска фазоделителя без подключения электрических нагрузок, чтобы проверить эффект разделения фаз. Определите С1 = 968 мкФ и С2 = 2904 мкФ. Момент механических потерь на валу (нагрузки) составит 28 Нм при частоте вращения ротора 1500 оборотов в минуту.
Смоделированные результаты запуска делителя фазы показаны на рисунках 11 и 12, где графики 1, 2, 3 — линейные напряжения между фазами A-B , B-C , C-A — и 4, скорость ротора.Пусковая способность С2 отключается при текущем значении напряжения между одним из проводов однофазного питания и проводом фазы обмотки статора фазоделителя, не подключенного к однофазному питанию (см. Рисунок 10), превысит значение 300 вольт — такая ситуация означает прекращение разгона ротора и прекращение образования трехфазной системы напряжения (сигнал 5 на рисунке 11).
Рисунок 11.
Результаты моделирования запуска делителя фазы.
Рисунок 12.
Результаты моделирования фазоделителя в установившемся режиме.
На рисунке 12 показаны результаты моделирования фазового разделения в установившемся режиме (при средней скорости ротора фазоделителя 1500 оборотов в минуту). На рисунке 12 кривые 6–8 представляют собой фазные токи A, B и C. В таблице 1 представлены численные результаты в установившемся режиме. Очевидно, эффект фазового расщепления наглядно демонстрируют результаты моделирования.
| Междуфазные напряжения (В) | Фазные токи (A) | ||||
|---|---|---|---|---|---|
| AB | BC 9025 A | BC 9025 A 9035 | B | C | | |
| 444 | 380 | 408 | 131.9 | 113,9 | 22,1 |
| Разделенная | Полученная от вторичной обмотки однофазного трансформатора | Разделенная | Без подключенных электрических нагрузок | ||
Таблица 1.
Результаты моделирования фазового делителя при -государственный режим.
Предложенная математическая модель трехфазного ИМ и способ ее компьютерной реализации подтвердили свою адекватность и эффективность для решения некоторых задач анализа и проектирования электротехнических комплексов и систем, имеющих в своем составе ИД.
6. Заключение
В заключение автор хотел бы обозначить пути улучшения предложенной математической модели трехфазного ИМ [13, 14]. Приоритетом для критики может быть отсутствие в математической модели, учитывающей скин-эффект в проводниках обмотки ротора. По сути, это заметный недостаток, поскольку в некоторых случаях смещение тока в роторе способно в несколько раз ускорить переходный процесс пуска АД [15, 16].
Существует два типа задач, для решения которых требуется математическая модель, учитывающая скин-эффект в проводниках обмотки ротора АД: правильное описание переходных процессов при прямом пуске и правильный учет потерь в обмотке ротора в случай питания от источника несинусоидального напряжения или тока.При решении задач первого типа автор иногда ставит активное сопротивление и индуктивное сопротивление утечки ротора, которые меняются в зависимости от скольжения. Решение задач второго типа требует согласования значений комплексных сопротивлений составляющих ротора с частотой тока в нем. Второй подход более универсален, так как может использоваться для решения обоих типов вышеперечисленных задач. По мнению автора, для реализации второго подхода лучше всего создать компьютерную реализацию математической модели трехфазного ИМ в исходных координатах.
Диаграммы тока двигателя | R&M Electrical Group
Диаграммы тока двигателей | R&M Electrical Group
ЛУЧШЕ • НАМНЕЕ • БЕЗОПАСНЕЕ
Технические ресурсы
Мы собрали ряд технических ресурсов для использования в качестве справочника по электрическим проектам.
Скачать в PDF
Таблицы выбора
— Трехфазные двигатели
Двигатели переменного тока — таблицы токов при полной нагрузке (1450 об / мин прибл.)
(предоставляется как руководство по выбору подходящего механизма управления MEM). Таблицы основаны на двигателях со средней эффективностью и коэффициентом мощности примерно 1450 об / мин. Двигатели с более высокой скоростью обычно потребляют меньший ток, чем указано в таблице; в то время как двигатели с меньшей скоростью обычно потребляют более высокий ток. Эти цифры могут сильно отличаться, особенно для однофазных двигателей, и инженеры должны, по возможности, определять фактическую f.l.c по паспортной табличке двигателя в каждом случае.
Однофазные двигатели
| НОМИНАЛ ДВИГАТЕЛЯ | HP | ПРИМ. F.L.C. НАПРЯЖЕНИЕ НА ЛИНИИ | ||
|---|---|---|---|---|
| 110 В переменного тока | 220 В переменного тока | 240 В переменного тока | ||
| 0,07 кВт | 1/12 | 2,4 | 1,2 | 1,1 |
| 0,1 кВт | 1/8 | 3,3 | 1,6 | 1,5 |
| 0.12 кВт | 1/6 | 3,8 | 1,9 | 1,7 |
| 0,18 кВт | 1/4 | 4,5 | 2,3 | 2,1 |
| 0,25 кВт | 1/3 | 5,8 | 2,9 | 2,6 |
| 0,37 кВт | 1/2 | 7,9 | 3,9 | 3,6 |
| 0,56 кВт | 3/4 | 11 | 5,5 | 5 |
| 0.75 кВт | 1 | 15 | 7,3 | 6,7 |
| 1,1 кВт | 1,5 | 21 | 10 | 9 |
| 1,5 кВт | 2 | 26 | 13 | 12 |
| 2,2 кВт | 3 | 37 | 19 | 17 |
| 3 кВт | 4 | 49 | 24 | 22 |
| 3,7 кВт | 5 | 54 | 27 | 25 |
| 4 кВт | 5.5 | 60 | 30 | 27 |
| 5,5 кВт | 7,5 | 85 | 41 | 38 |
| 7,5 кВт | 10 | 110 | 55 | 50 |
Трехфазные двигатели
| НОМИНАЛ ДВИГАТЕЛЯ | HP | ПРИМ. F.L.C. НАПРЯЖЕНИЕ НА ЛИНИИ | ||||
|---|---|---|---|---|---|---|
| 220 В переменного тока | 240 В переменного тока | 380 В переменного тока | 415 В переменного тока | 550 В переменного тока | ||
| 0.1 кВт | 1/8 | 0,7 | 0,6 | 0,4 | 0,4 | 0,3 |
| 0,12 кВт | 1/6 | 1 | 0,9 | 0,5 | 0,5 | 0,3 |
| 0,18 кВт | 1/4 | 1,3 | 1,2 | 0,8 | 0,7 | 0,4 |
| 0,25 кВт | 1/3 | 1,6 | 1,5 | 0,9 | 0,9 | 0.6 |
| 0,37 кВт | 1/2 | 2,5 | 2,3 | 1,4 | 1,3 | 0,8 |
| 0,56 кВт | 3/4 | 3,1 | 2,8 | 1,8 | 1,6 | 1,1 |
| 0,75 кВт | 1 | 3,5 | 3,2 | 2 | 1,8 | 1,4 |
| 1,1 кВт | 1,5 | 5 | 4,5 | 2.8 | 2,6 | 1,9 |
| 1,5 кВт | 2 | 6,4 | 5,8 | 3,7 | 3,4 | 2,6 |
| 2,2 кВт | 3 | 9,5 | 8,7 | 5,5 | 5 | 3,5 |
| 3,0 кВт | 4 | 12 | 11 | 7 | 6,5 | 4,7 |
| 3,7 кВт | 5 | 15 | 13 | 8 | 8 | 6 |
| 4.0 кВт | 5,5 | 16 | 14 | 9 | 8 | 6 |
| 5,5 кВт | 7,5 | 20 | 19 | 12 | 11 | 8 |
| 7,5 кВт | 10 | 27 | 25 | 16 | 15 | 11 |
| 9,3 кВт | 12,5 | 34 | 32 | 20 | 18 | 14 |
| 10 кВт | 13.5 | 37 | 34 | 22 | 20 | 15 |
| 11 кВт | 15 | 41 | 37 | 23 | 22 | 16 |
| 15 кВт | 20 | 64 | 50 | 31 | 28 | 21 |
| 18 кВт | 25 | 67 | 62 | 39 | 36 | 26 |
| 22 кВт | 30 | 74 | 70 | 43 | 39 | 30 |
| 30 кВт | 40 | 99 | 91 | 57 | 52 | 41 |
| 37 кВт | 50 | 130 | 119 | 75 | 69 | 50 |
| 45 кВт | 60 | 147 | 136 | 86 | 79 | 59 |
| 55 кВт | 75 | 183 | 166 | 105 | 96 | 72 |
| 75 кВт | 100 | 239 | 219 | 138 | 125 | 95 |
| 90 кВт | 125 | 301 | 269 | 170 | 156 | 117 |
| 110 кВт | 150 | 350 | 325 | 205 | 189 | 142 |
| 130 кВт | 175 | 410 | 389 | 245 | 224 | 169 |
| 150 кВт | 200 | 505 | 440 | 278 | 255 | 192 |
Загрузить в формате PDF
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ: Информация на этой странице и в PDF-файле предназначена только для информации, и R&M Electrical Group Ltd не несет ответственности за любую содержащуюся там информацию.
Модель динамики трехфазной асинхронной машины,
также известен как индукционная машина
и частота
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц). По умолчанию [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ом или pu) и индуктивность рассеяния
Lls (H или pu).По умолчанию [0,01965 0,0397] для
единицы о.е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлено значение Wound или Squirrel-cage .
По умолчанию [0,01909 0.0397] для блоков PU и [0,6258 для единиц СИ.
0,005473]
Сопротивление ротора Rr1 ‘(Ом или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4155 для единиц СИ.
0.002066]
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4168 для единиц СИ.
0,0003495]
Намагничивающая индуктивность Lm (H или pu).По умолчанию 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
пары полюсов
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.
Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F.w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна о.у. единиц :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p.По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы),
величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если параметр Тип ротора установлен на Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для о.у.
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора.
железо моделируется или нет. По умолчанию очищено.
Определяет параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763 для единиц pu и
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] [14.03593122,
27.81365428, 53.79336849, 72.688
302.9841135, 428.7778367; 230, 322, 414, 460, 506, 552, 598, 644,
690] для единиц СИ ..
Вы должны выбрать Simulate saturation check
коробка для имитации насыщенности. Если вы не выбрали Simulate
флажок насыщения , связь между статором
ток и напряжение статора линейны.
Щелкните График , чтобы просмотреть указанную без нагрузки
кривая насыщения.
Моделируйте динамику трехфазной асинхронной машины,
также известен как индукционная машина
и частота
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц).По умолчанию [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ом или pu) и индуктивность рассеяния
Lls (H или pu). По умолчанию [0,01965 0,0397] для
единицы о.е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору.Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлено значение Wound или Squirrel-cage .
По умолчанию [0,01909 0,0397] для о.у. и [0,6258 для единиц СИ.
0,005473]
Сопротивление ротора Rr1 ‘(Ом или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка .По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4155 для единиц СИ.
0,002066]
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация
установлен на Двойная беличья клетка . По умолчанию
равно [0,01909 0,0397] для единиц о.е. и [0.4168 для единиц СИ.
0,0003495]
Намагничивающая индуктивность Lm (H или pu). По умолчанию 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
пары полюсов
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F.w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна о.у. единиц :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p. По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы),
величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если параметр Тип ротора установлен на Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для о.у.
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора.
железо моделируется или нет. По умолчанию очищено.
Определяет параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763 для единиц pu и
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] [14.03593122,
27.81365428, 53.79336849, 72.688
302.9841135, 428.7778367; 230, 322, 414, 460, 506, 552, 598, 644,
690] для единиц СИ ..
Вы должны выбрать Simulate saturation check
коробка для имитации насыщенности. Если вы не выбрали Simulate
флажок насыщения , связь между статором
ток и напряжение статора линейны.
Щелкните График , чтобы просмотреть указанную без нагрузки
кривая насыщения.
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
»
×
Отправить предложение
Избранные товары
Название*
Название компании*
Состояние*
Телефон*
Электронное письмо*
Как вы о нас узнали?*
Приблиз. единиц / год
Комментарии
* Поля, обязательные для заполнения
продолжить поиск
- Продукты
- Обзор
- Двигатели постоянного тока
- Двигатели переменного тока
- Двигатели BLDC
- Универсальные моторы
- Редукторы КПП
- Регулятор скорости двигателя
- Компоненты двигателя
- модифицированный и нестандартный
- Инструмент для поиска двигателей
- О
- Обзор
- История
- Партнерства
- Работа и карьера
- Инженерный отдел
- Лидерство
- Новости и события
- Положения и условия
- Политика возврата
- Примеры из практики
- Обзор
- Сельское хозяйство
- Энергия
- Автомобили и внедорожники
- Торговое оборудование
- Строительство
- Еда и напитки
- Конвейер и погрузочно-разгрузочные работы
- Решения для здравоохранения
- Упаковка
- Насосы и решения для жидкостей
- Отдых
- Безопасность
- Дизайн, отмеченный наградами
- ресурса
- Калькулятор STP
- Сравнить типы двигателей
- Характеристики приложения для загрузки
- Загрузить литературу
- Определить характеристики двигателя
- Уравнения и преобразования
- Таблицы данных MOTORTEC ™
- Об инструменте поиска двигателей
- Как настроить двигатель
- Руководство по поиску и устранению неисправностей
- Groschopp Часто задаваемые вопросы
Схема подключения
- Контакт
- Карьера
- Логин
- Тележка (0)
- Продукты
- Около
- Примеры из практики
- ресурса
.