Полиспаст схема: Недопустимое название — Wiki.risk.ru
расчет, запасовка, сборка своими руками
Полиспаст – переносная блочная система, предназначенная для подъема и перемещения грузов разной степени тяжести. Это устройство применяется в строительной сфере, логистике, альпинизме и во время спасательных работ. Чтобы изготовить полиспаст своими руками, нужно знать конструктивные особенности этого приспособления, способы крепления канатов к грузоподъемнику и технологию проведения запасовки.
Общие сведения о полиспастах
Полиспаст состоит из 2-х и более шкивов (блоков), связанных при помощи веревочных канатов или цепей:
- Неподвижный шкив. Этот блок крепится к крепким статичным элементам или спецтехнике. Он включает в себя несколько роликов. По каждому из них проводятся веревки, металлические канаты или железные цепи. Неподвижный шкив распределяет давление между элементами конструкции. Величина давления на каждый канат определяется числом роликов.
- Подвижный шкив. Этот блок прикрепляется к грузу и используется для поддержания работоспособности грузоподъемного механизма.
 Он оборудован крюком, карабином и магнитом. Подвижный шкив, прикрепляясь к грузу, способен выиграть в усилиях.
Он оборудован крюком, карабином и магнитом. Подвижный шкив, прикрепляясь к грузу, способен выиграть в усилиях.
Простые полиспасты могут состоять из 1 шкива и веревки. В них ролик располагается над грузом: на потолке, балке или опоре. Первый конец веревки связан с крюком и спускается к поднимаемому грузу. Человек тянет второй конец веревки, поднимая тяжелый объект. Сложные устройства для подъема груза включают в себя несколько простых блоков и дают больший выигрыш в силе.
Принцип действия полиспастов основан на правиле рычага. Через неподвижный шкив перекидывается веревка. Груз поднимается на высоту посредством прикладывания усилий, соразмерных с весом поднимаемого объекта. Длина каната или цепи должна быть сопоставима с высотой, на которую поднимается груз. Для снижения количества затрачиваемых усилий необходимо, чтобы подвижный блок осуществлял движение параллельно грузу.
Существуют следующие разновидности полиспастов:
- По предназначению: силовые и скоростные.
 Силовые механизмы предназначены для транспортировки тяжелых объектов. Они обеспечивают выигрыш в силе за счет потерь в расстоянии и скорости. Скоростные полиспасты позволяют ускорить процесс транспортировки легких грузов за счет уменьшения прикладываемых усилий.
Силовые механизмы предназначены для транспортировки тяжелых объектов. Они обеспечивают выигрыш в силе за счет потерь в расстоянии и скорости. Скоростные полиспасты позволяют ускорить процесс транспортировки легких грузов за счет уменьшения прикладываемых усилий. - По сложности схемы. В простых схемах подъема груза при помощи блоков все ролики соединены последовательно при помощи 1 цепи или каната. Сложные системы отличаются высокой производительностью. Выигрыш в силе обеспечивается при меньшем количестве блоков.
Полиспасты используются для следующих операций:
- Для натяжения кабелей, силовых линий и подвесных конструкций.
- Совместно с лебедкой для вытаскивания автомобиля или иного вида транспорта, застрявшего в грязи или грунте.
- Для проведения такелажных работ при транспортировке тяжелых конструкций.
Полиспастами оснащаются различные виды кранов, гидравлические и электрические приводы. Они также применялись в старых прототипах лифтов.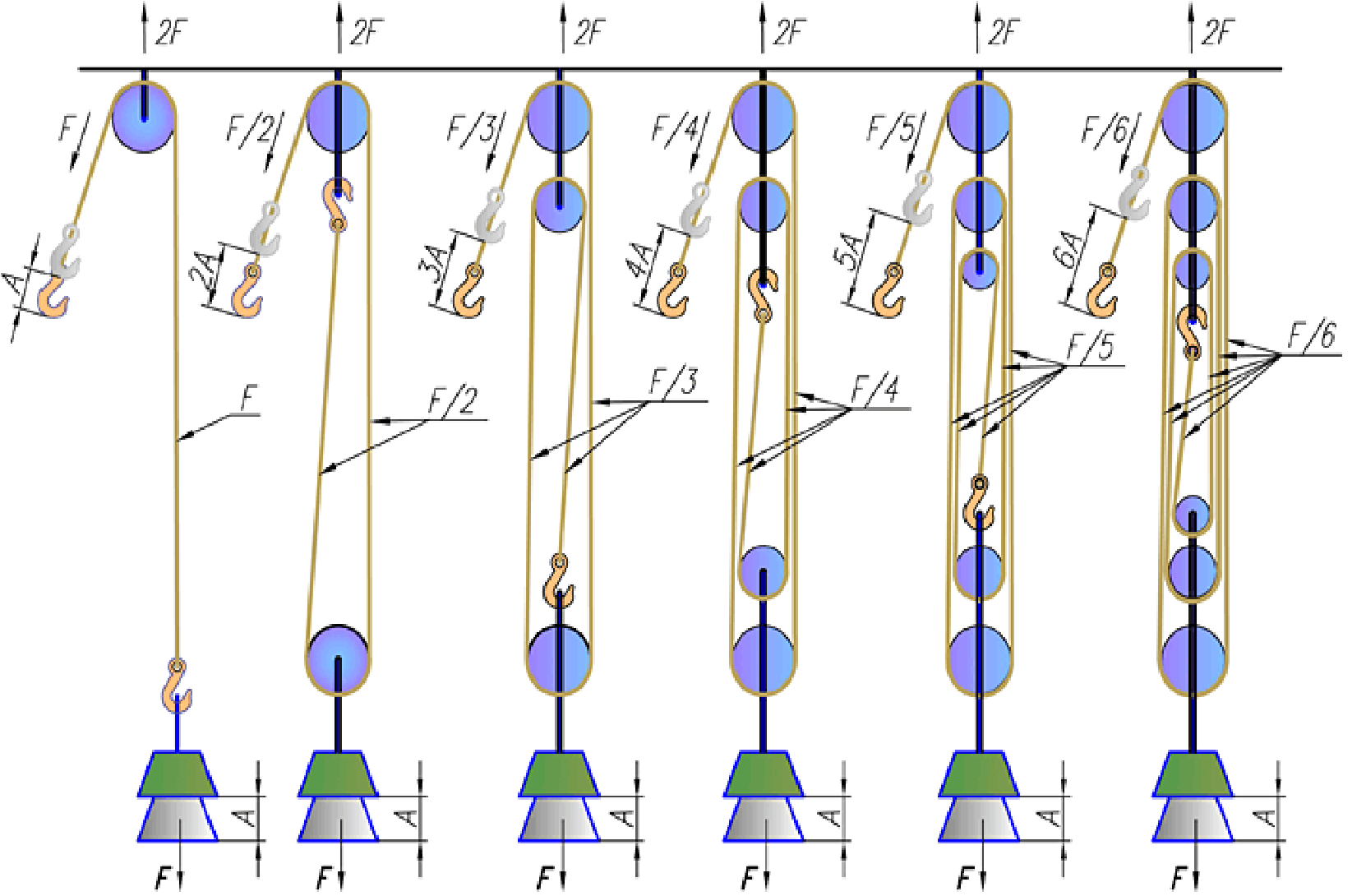
Расчет полиспаста
Перед изготовлением полиспаста требуется рассчитать основные технические характеристики грузоподъемной конструкции. Расчеты требуется для составления чертежей и производятся согласно параметрам рабочего помещениями и весом груза.
Для определения нагрузок, влияющих на блочную систему в ходе эксплуатации, нужно рассчитать параметры, действующие на отдельные блоки:
- Силу воздействия поднимаемого груза (SC).
- Тяговую силу двигателя (SM).
- Угол отклонения (α). При расчете параметров полиспаста этой характеристикой можно пренебречь, потому что у современных устройств угол отклонения отсутствует.
- Диаметр блока (D).
- Диаметр втулки (d).
Уравнение, использующееся для нахождения моментов силы, имеет следующий вид: SM * R = SC*R + l*SC*R + N* g*d/2, где:
- SM * R – момент силы, с которой груз оказывает влияние на блочную систему.

- l – коэффициент, характеризующий жесткость ручного веревочного каната при огибании ролика. Он зависит от структуры витков троса и определяется экспериментальным методом.
- Нагрузка на ось шкива. Она определяется по формуле: 2*SC*R.
- g – коэффициент, характеризующий силу трения втулки шкивов.
Коэффициент полезного действия полиспаста определяется по следующей формуле: η = SC/SM. На этот параметр влияют качество изготовления блоков и сложность схемы. Существует следующие уровни КПД блочной системы:
- 97% — используется в качестве среднего значения, если в элементах грузоподъемного устройства присутствуют подшипники качения и втулки из бронзы.
- 95% — используются подшипники скольжения.
- 93% и ниже – при работе грузоподъемного механизма в суровых природных условиях или в помещениях с высокой температурой.
При расчете также рекомендуется определить КПД остальных обводных роликов, в зависимости от конструктивных особенностей грузоподъемного механизма.
Способы крепления веревки к грузоподъемному механизму
Грузовая веревка позволяет автоматически фиксировать поднимаемый груз, что сказывается на проходе узлов. Ее нужно заправить так, чтобы исключалась возможность перетирания из-за частых контактов с остальными частями грузоподъемной конструкции. Выделяют 3 основных метода крепления веревки к полиспасту:
- С помощью схватывающих узлов, изготавливающихся из репшнуров диаметром до 8 мм. Они обладают высокой прочностью и начинают сползать с веревки только при нагрузке 10 – 13 кН. Схватывающие узлы не подвергает канат деформации. При длительной эксплуатации они оплавляют оплетку и прилипают к веревке, становясь предохранителями.
- С помощью зажима общего направления. Его рекомендуется применять на влажных и обледенелых веревках. Зажим начинает сползать без возникновения деформаций при нагрузке 6-7 кН.
- При помощи личного зажима. Он сползает при нагрузках от 4 кН, разрывая оплетку.
Для фиксации канатов кранов требуется закрепить 1 конец веревки запреткой или тросовым зажимом. На лебедках трос фиксируется на специальных креплениях при помощи клина и прижимной планки.
На лебедках трос фиксируется на специальных креплениях при помощи клина и прижимной планки.
Простейший подъемный механизм своими руками
В домашних мастерских можно изготовить простой полиспаст из подручных материалов. Он способен поднимать легкие грузы и может использоваться только для разовых работ. Чтобы сделать полиспаст своими руками, нужно приобрести следующие комплектующие:
- Шпильки с резьбой, изготовленные из металлических материалов.
- 2 ролика.
- Подшипники.
- Веревка или трос.
- Крюк.
На стальную шпильку устанавливают подшипник, накручивают гайку и стопорят. К шпильке присоединяется крюк для снижения усилий, требующихся для прокручивания самодельного вала. Первый конец веревки располагается на статичной платформе. Для поднятия груза требуется потянуть второй конец троса вверх. Для удобства работы рекомендуется сделать дополнительный блок и пропустить через него веревку. Это позволит соединить канат с лебедкой и фиксировать транспортируемый объект в промежуточном положении.
Запасовка полиспастов
Запасовка – процедуру изменения местоположения шкивов и дистанции между ними. Целью этой операции является регулирование скорости и высоты подъема грузов в соответствии с определенной схемой прохождения троса по блокам грузоподъемного механизма. Существуют следующие разновидности запасовки:
- Однократная. На крюке закрепляется 1 веревка, которая проводится через все неподвижные блоки и наматывается на барабан.
- Двукратная. Первый конец каната крепят на головке поворотного элемента крана, второй – на лебедке. Этот способ запасовки может применяться на кранах стрелового типа.
- Четырехкратная. 2 рабочих ветви троса проводятся через шкивы рабочей стрелы. Соседние полиспасты скрепляются между собой при помощи статичного блока, устанавливаемого на стойке платформы. Этот метод запасовки используется для устройств с большой грузоподъемностью.
Существует также переменная запасовка. Она бывает как двукратной, так и четырехкратной. Подвижные ролики устанавливаются на нескольких подвижным обоймах, удерживаемых при помощи каната. Кратность запасовки изменяется посредством опускания подвески крюка на опору при сматывании веревки.
Подвижные ролики устанавливаются на нескольких подвижным обоймах, удерживаемых при помощи каната. Кратность запасовки изменяется посредством опускания подвески крюка на опору при сматывании веревки.
Полиспасты. Назначение и устройство | ПроИнструмент
Полиспастами называют систему, образуемую подвижными и неподвижными блоками, которые соединяются между собой канатными (реже – цепными) передачами. Известные ещё в античные времена, полиспасты и сейчас являют собой устройство, без которого не может функционировать подъёмно-транспортная техника. По сути, за тысячелетия не очень изменились и составляющие этого механизма. Полиспасты, их назначение и устройство – вопросы, важные для эффективного использования всех конструкций механизмов подъёма.
Устройство полиспаста и условия его работы
Основная область применения полиспастов – стреловые механизмы кранов. Всё многообразие полиспастов может быть сведено к двум требованиям: либо увеличить силу (силовые полиспасты), либо поднять скорость (скоростные полиспасты). В подъёмных кранах чаще используются первые, а подъёмниках – вторые. Таким образом, схемы скоростных и силовых полиспастов взаимно обратные.
В подъёмных кранах чаще используются первые, а подъёмниках – вторые. Таким образом, схемы скоростных и силовых полиспастов взаимно обратные.
В состав полиспаста входят следующие составляющие:
- Блоки с неподвижными осями
- Блоки с подвижными осями.
- Обводные блоки.
- Обводочные барабаны.
Все вышеперечисленные элементы располагаются преимущественно в вертикальной компоновке, причём место размещения барабана зависит от наличия обводных блоков: сверху, если такие блоки отсутствуют, и снизу – если присутствуют.
Количество блоков с неподвижными осями всегда на один меньше, чем с подвижными. При этом общее количество блоков определяет (для силовых полиспастов) кратность увеличения суммарного усилия на механизме. Количество обводных блоков определяется размерами узла: с увеличением числа таких блоков усилие также увеличивается.
Силовые полиспасты, назначение и устройство которых характеризуется несколькими параметрами, важнейшим из которых является нагрузка, развиваемая в подъёмном механизме. Она увеличивается с увеличением расчётной грузоподъёмности крана, кратности устройства (количества ветвей каната, на которых подвешен груз) и КПД блока. КПД учитывает потери на трение в осевых опорах, а также потери, определяемые жёсткостью каната или цепи.
Она увеличивается с увеличением расчётной грузоподъёмности крана, кратности устройства (количества ветвей каната, на которых подвешен груз) и КПД блока. КПД учитывает потери на трение в осевых опорах, а также потери, определяемые жёсткостью каната или цепи.
Полиспастов может быть несколько, тогда суммарная нагрузка на блок пропорционально уменьшается. Одинарные полиспасты конструктивно проще, но и наименее эффективны. В них один конец неподвижно закрепляется на неподвижном элементе, а второй – на барабане. При этом угол отклонения весьма ограничен из-за опасности схода каната с блока. Наличие обводного блока существенно улучшает условия работы механизма: нагрузка становится симметричной, что снижает износ каната, и увеличивает допустимую скорость вращения блоков. Устойчивость действия полиспаста зависит также от расстояния между обводным и основными блоками. С увеличением этого параметра надёжность полиспаста как функционального узла возрастает, хотя одновременно увеличивается (из-за наличия соединительной оси) и его сложность.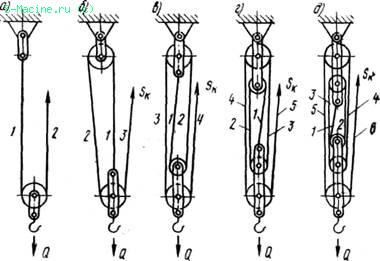
Другими схемами полиспастов, применяемых на практике, являются:
- Сдвоенные трёхкратные, когда в схеме присутствует три рабочих блока и два обводных;
- Сдвоенные трёхкратные, снабжённые уравнительной траверсой. Вариант используется в грузоподъёмной технике, которая эксплуатируется в тяжёлых и особо тяжёлых условиях.
Эксплуатационные характеристики полиспастов и их выбор
На эффективность, которой обладают полиспасты, на их назначение и устройство в конкретном механизме влияние оказывают следующие факторы:
- Грузоподъёмность основного механизма, в составе которого работают данные узлы.
- Количество обводных блоков: с ростом их числа потери на трение возрастают.

- Углы отклонения канатов от средней плоскости барабана.
- Диаметры блоков.
- Диаметр каната/высота цепи.
- Материал каната.
- Характер опор (в подшипниках качения или скольжения).
- Условия смазки всех осей полиспаста.
- Скорость вращения блоков или перемещения тяговых канатов (в зависимости от назначения устройства).
Наибольшие потери в полиспастах связаны с условиями трения. В частности, КПД рассматриваемых механизмов, которые работают в подшипниках скольжения, в зависимости от условий их эксплуатации, составляет:
- При неудовлетворительной смазке и при повышенных температурах — 0,94…0,54;
- При редкой смазке – 0,95…0,60;
- При периодической смазке — 0,96…0,67;
- При автоматической смазке – 0,97…0,74.
Меньшие значения соответствуют полиспастам с максимально возможной кратностью. Потери на трение для узлов, которые работают в подшипниках качения, гораздо ниже, и составляют:
- При недостаточной смазке и высоких температурах эксплуатации – 0,99…0,83;
- При нормальных рабочих температурах и смазке – 1,0…0,92.

Таким образом, применяя современные антифрикционные покрытия контактной поверхности блоков, можно практически исключать потери на трение.
Углы отклонения каната, располагающегося на блоке/блоках полиспаста, определяют не только износ канатов и блоков, но и безопасность производственного персонала грузоподъёмного устройства. Объясняется это тем, что при превышении допустимых показателей сход каната с блока чреват производственной аварией. На данный параметр влияют материал канатов, профиль канавки барабана, а также направление навивки.
Материалами канатов чаще всего служат типы ТЛК-О по ГОСТ 3079, ЛК-Р по ГОСТ 2688 и ТК по ГОСТ 3071. Третий тип имеет наименьшую жёсткость (не более 1,7), что положительно сказывается на предельно допустимом угле отклонения каната на полиспасте. Соответственно для канатов двух первых типов жёсткость достигает 2.
Нормальными углами отклонения от оси полиспаста считаются углы 7,5…2,50 (меньшие значения принимаются для максимальных соотношений диаметра блока к диаметру каната).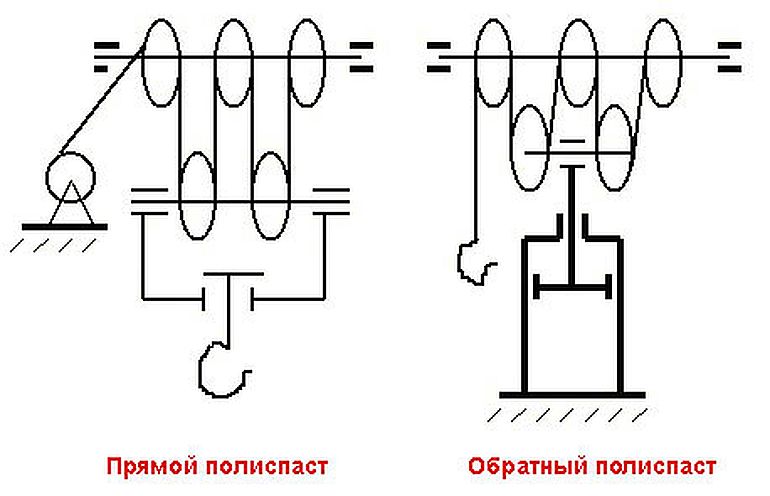 Вообще при проектировании данных устройств это соотношение всегда стараются выбирать в диапазоне значений 12…40. Допустимый угол отклонения канатов из маложёстких материалов меньше: до 6,5…20.
Вообще при проектировании данных устройств это соотношение всегда стараются выбирать в диапазоне значений 12…40. Допустимый угол отклонения канатов из маложёстких материалов меньше: до 6,5…20.
ГОСТ допускает увеличение предельного отклонения, по сравнению с рекомендуемым не более, чем на 10…20% (зависит от режима работы грузоподъёмной техники). На уравнительном блоке допустимые углы отклонения могут увеличиваться, но не более, чем в 1,5 раза.
Для снижения углов отклонения на барабанах полиспастов изготавливают профильные канавки, причём угол их направления зависит от направления навивки. Поэтому барабаны в механизмах современной конструкции всегда выполняют с крестовым профилем, пригодным под оба типа навивки.
Запасовка полиспастов
Запасовка – технологическая операция изменения расположения основных грузовых блоков полиспаста, а также расстояний между ними. Целью запасовки является изменение скорости или высоты подъёма грузов путём определённой схемы прохождения канатов по блокам устройства.
Целью запасовки является изменение скорости или высоты подъёма грузов путём определённой схемы прохождения канатов по блокам устройства.
Схемы запасовки определяются типом грузоподъёмной техники. Известно, в частности, что механизмы изменения вылета стрелы различны для ручной или электротали – с одной стороны, и для кранов – с другой. Поэтому для лебёдок запасовка производится изменением расположения оси направляющего блока, и предназначается только для изменения длины вылета стрелы. В грузовых кранах запасовкой исправляют возможную криволинейность перемещения груза. Кроме грузовых канатов, запасовку применяют также и для канатных устройств перемещения рабочей тележки.
Различают следующие схемы запасовок:
- Однократная, которая применяется для грузоподъёмных механизмов стрелового типа с гуськом. Крюк при этом подвешивается на одной нитке каната, последовательно проводится через все неподвижные блоки, после чего наматывается на барабан.
 Такой способ запасовки наименее эффективен.
Такой способ запасовки наименее эффективен. - Двухкратная, которая может быть применена на кранах, как с подъёмной, так и балочной стрелой. В первом случае неподвижные блоки располагаются на головке стрелы, а противоположный конец каната закрепляется в грузовой лебёдке. Во втором случае один из концов каната закрепляют на корне стрелы, а второй последовательно пропускают через обводной барабан, блоки крюковой подвески, стреловые блоки, блоки оголовка башни и затем подводят к грузовой лебёдке.
- Четырёхкратная, используемая для механизмов большой грузоподъёмности. Здесь реализуется одна из схем, описанных выше, но отдельно по каждому из блоков крюковой подвески. Две рабочих ветви каната при этом направляются на блоки рабочей стрелы. Соединение смежных полиспастов производится через дополнительный неподвижный блок, который устанавливается на стойке платформы поворота крана.
- Переменная, суть которой состоит в изменении грузоподъёмности крана.
 При таком виде запасовки (она может быть и двух-, и четырёхкратной) возможно соответствующее увеличение массы поднимаемого груза. Для этого в подвижные блоки дополнительно устанавливают по одной или две подвижных обоймы. Удержание обойм производит сам грузовой канат из-за разницы в усилиях, которые создаются наличием крюковой подвески. Изменение кратности запасовки выполняется опусканием крюковой подвески на опору при продолжающемся сматывании каната.
При таком виде запасовки (она может быть и двух-, и четырёхкратной) возможно соответствующее увеличение массы поднимаемого груза. Для этого в подвижные блоки дополнительно устанавливают по одной или две подвижных обоймы. Удержание обойм производит сам грузовой канат из-за разницы в усилиях, которые создаются наличием крюковой подвески. Изменение кратности запасовки выполняется опусканием крюковой подвески на опору при продолжающемся сматывании каната.
Двух- и особенно – четырёхкратная запасовка позволяет производить безопасный подъём груза, который практически вдвое превышает тяговое усилие, развиваемое лебёдкой. При этом проворот канатов под нагрузкой исключается, что существенно снижает их износ.
Масса полиспаста.
 Силовой полиспаст. Скоростной полиспаст. Схемы полиспастов. Что дает использование направляющих роликов
Силовой полиспаст. Скоростной полиспаст. Схемы полиспастов. Что дает использование направляющих роликов
Полиспаст
— система подвижных и неподвижных блоков, соединенных гибкой связью (канатом или цепью), применяемая для увеличения силы — силовой полиспаст
или скорости — скоростной полиспаст
. Обычно в применяют силовые полиспасты, позволяющие уменьшить натяжение гибкого грузового органа, момент от веса груза на барабане и передаточное число механизма. Скоростные полиспасты, позволяющие получить повышение скорости перемещения груза при малых скоростях приводного элемента, применяют значительно реже, например, в гидравлических или пневматических подъемниках. В полиспаст входят подвижные блоки, ось которых перемещается в пространстве, и неподвижные блоки.
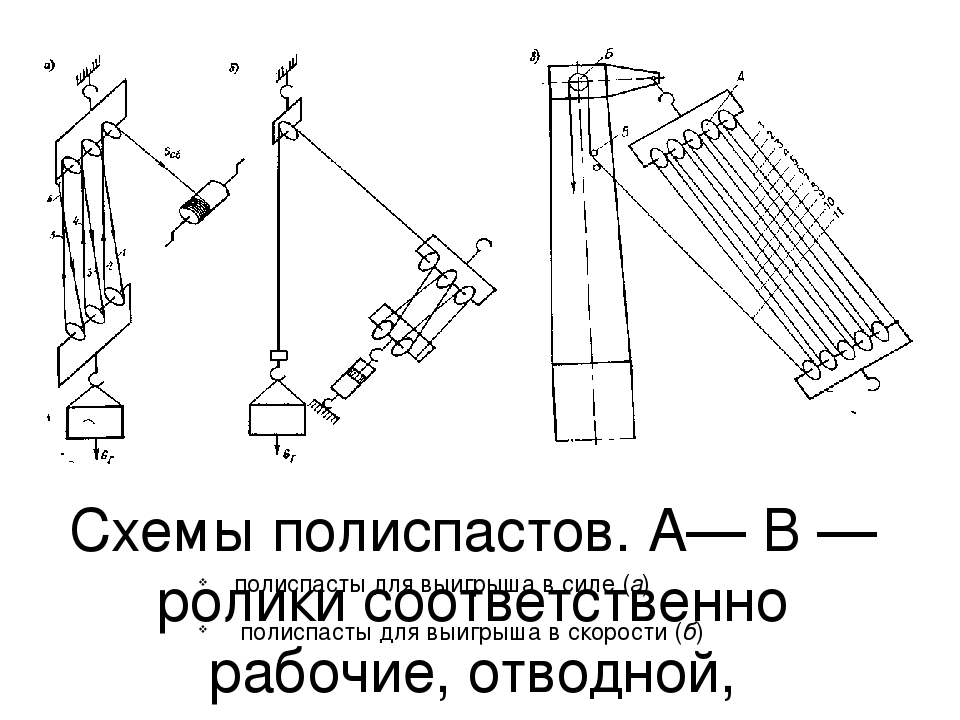
Схемы полиспастов
Рис. 1: а – одинарный двухкратный; б – одинарный трехкратный; в, д – сдвоенные двухкратные; г – сдвоенный трехкратный
В одинарных полиспастах (рис.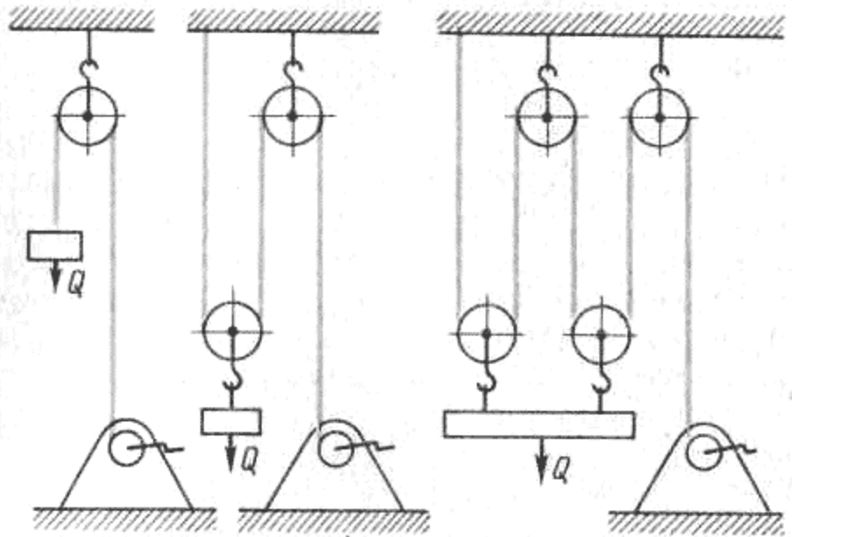 1, а, б) один конец закреплен на барабане, а второй конец закрепляется при четной кратности (а) на неподвижном элементе конструкции, а при нечетной кратности (б) — на крюковой обойме. При наматывании или сматывании каната с барабана, если отсутствуют обводные блоки, то есть канат с блока крюковой обоймы непосредственно переходит на барабан, происходит перемещение груза не только по вертикали, но и по горизонтали.
1, а, б) один конец закреплен на барабане, а второй конец закрепляется при четной кратности (а) на неподвижном элементе конструкции, а при нечетной кратности (б) — на крюковой обойме. При наматывании или сматывании каната с барабана, если отсутствуют обводные блоки, то есть канат с блока крюковой обоймы непосредственно переходит на барабан, происходит перемещение груза не только по вертикали, но и по горизонтали.
Для обеспечения строго вертикального подъема груза применяют сдвоенные полиспасты (рис. 1, в-д), состоящие из двух одинарных полиспастов. В этом случае на барабане закрепляют оба конца каната. Для обеспечения нормального положения при неравномерной вытяжке ветвей каната обоих полиспастов применяют установку балансира или, что чаще, уравнительного блока C (рис. 1, в). При установке уравнительного блока можно использовать целый канат без дополнительных креплений на балансирах. Однако осмотр и контроль состояния каната на этом блоке вследствие малого угла поворота затруднительны. Поэтому в кранах с тяжелым и весьма тяжелым режимом работы предпочтительно применять уравнительные балансиры А (рис. 73, д).
Уравнительный блок C при подъеме и спуске груза обычно не вращается и служит лишь для уравнивания длины ветвей обоих полиспастов при неравномерной вытяжке каната, поэтому согласно правилам Госгортехнадзора допускается его диаметр принимать равным 0,8 диаметра, определенного по формуле, а у электроталей и стреловых самоходных кранов — равным 0,6 этого диаметра. При четной кратности полиспаста он располагается среди неподвижных блоков, а при нечетной — среди подвижных блоков крюковой подвески.
Расчет сдвоенного полиспаста ведут аналогично , причем каждый полиспаст рассматривают отдельно при действии на него половины общей нагрузки. Если h — высота подъема груза, то длина каната одинарного полиспаста, наматываемого на барабан, L = ah, где a — кратность полиспаста. Кратность сдвоенного полиспаста равна кратности одинарных полиспастов, составляющих его. Для сдвоенного полиспаста величина L соответствует длине каната, наматываемого на одну половину барабана.
Скорость подъема груза υ гр и скорость каната, навиваемого на барабан связаны между собой соотношением υ = aυ гр, где υ = πD 2 n бар /60, м/с; D 2 — диаметр барабана, измеренный по центру каната; n бар — частота вращения барабана, об/мин.
Силовой полиспаст
В силовых полиспастах грузоподъемных машин можно использовать канаты небольшого диаметра и, следовательно, уменьшить диаметры барабана и блоков, снизить массу и габариты . Увеличение кратности полиспаста позволяет снизить передаточное число редуктора, но одновременно требует большей длины каната и канатоемкости барабана. Увеличение числа блоков при повышении кратности полиспаста вызывает увеличение потерь и возрастание мощности, затрачиваемой на подъем груза, а также увеличивает число перегибов каната, что вызывает некоторое снижение его срока службы. В то же время, как уже указывалось, канат при большой кратности полиспаста имеет небольшой диаметр и, следовательно, большую гибкость, что способствует увеличению долговечности. Выбор каната, типа и кратности полиспаста связан с проблемой общей компоновки механизма и с его параметрами, в частности с передаточным числом механизма, габаритами и массой, что в свою очередь влияет на размеры всей грузоподъемной машины и на размеры здания, где эта машина устанавливается.
Так, если для подъема груза одного и того же веса G гр с одинаковой заданной скоростью подъема υ гр применять полиспасты различной кратности, то параметры механизмов подъема будут различными. Статическая мощность этих механизмов N ст = G гр υ гр /1000η п, необходимая для подъема груза, будет другой только из-за различия в значениях КПД, и при кратностях, отличающихся незначительно (например, механизмы с кратностью два и четыре), потребную мощность двигателя можно считать одинаковой. Так как максимальные силы в канатах полиспастов изменяются практически обратно пропорционально кратности полиспаста, то с увеличением кратности уменьшаются нагрузка в канате и его диаметр, а также и диаметр барабана. Скорость наматывания каната на барабан изменяется прямо пропорционально кратности, и в полиспасте с большей кратностью она имеет большее значение. Тогда при одинаковой заданной скорости подъема и одинаковой частоте вращения ротора передаточное число редуктора, соединяющего двигатель с барабаном, оказывается меньше при полиспасте большей кратности благодаря большей скорости навивки каната на барабан и меньшему его диаметру.
Скоростной полиспаст
Скоростной полиспаст
(рис. 2) отличается от силового полиспаста тем, что в нем рабочая сила F, обычно развиваемая гидравлическим или пневматическим цилиндром, прикладывается к подвижной обойме, а груз подвешивается к свободному концу каната.
Схема скоростного полиспаста
Рис. 2
Расчет скоростных полиспастов принципиально не отличается от расчета силового полиспаста. При перемещении обоймы полиспаста (точки А на рис. 2) на расстояние h груз проходит путь H = ah, где a — кратность скоростного полиспаста и, следовательно, скорость перемещения груза υгр = aυА, где υА — скорость перемещения обоймы полиспаста.
Сила F, необходимая для подъема груза весом Gгр, определяется по формуле.
БЛОКИ И ПОЛИСПАСТЫ
простые грузоподъемные механизмы, основные детали которых — колесо с окружным желобом (шкив) и веревка или трос; используются для подъема тяжестей с приложением небольших усилий (либо с приложением усилий в удобной позиции работающего) как в качестве рабочих органов подъемных машин (лебедок, талей, подъемных кранов), так и независимо от них. Обычно блоком называют устройство, состоящее из одного шкива в оправе с подвесом и одного троса; полиспастом — комбинацию шкивов и тросов. Принципы действия этих механизмов поясняются на рисунках. На рис.1,а груз весом W1 поднимают с помощью одиночного блока усилием P1, равным весу. На рис.1,б груз W2 поднимают простейшим кратным полиспастом, состоящим из двух блоков, усилием P2, равным только половине веса W2. Воздействие этого веса делится поровну между ветвями троса, на которых шкив B2 подвешен к шкиву A2 с помощью крюка C2. Следовательно, для того чтобы поднять груз W2, к ветви троса, проходящей через желоб шкива A2, достаточно приложить силу P2, равную половине веса W2; таким образом, простейший полиспаст дает двойной выигрыш в силе. Рис.1,в поясняет работу полиспаста с двумя шкивами, каждый из которых имеет два желоба. Здесь усилие P3, необходимое для поднятия груза W3, составляет лишь четверть его веса. Это достигается благодаря распределению всего веса W3 между четырьмя тросами подвеса блока B3. Отметим, что кратность выигрыша в силе при подъеме тяжестей всегда равна числу тросов, на которых висит подвижный блок B3. Полиспаст по своему принципу действия подобен рычагу: выигрыш в силе равен проигрышу в расстоянии при теоретическом равенстве совершаемых работ. Тросом блоков и полиспастов в прошлом обычно служил гибкий и прочный пеньковый канат. Его сплетали косой из трех прядей (каждая прядь, в свою очередь, сплеталась из множества мелких прядок). Полиспасты с пеньковыми канатами широко использовались на кораблях, сельскохозяйственных фермах и вообще там, где требуется эпизодическое или периодическое приложение силы для подъема груза. Самые сложные из таких полиспастов (рис. 2) применялись, по-видимому, на парусных судах, где в них всегда была насущная потребность при работе с парусами, деталями рангоута и другой перемещаемой оснастки. Позже для частых перемещений больших грузов начали использовать стальные тросы, а также тросы из синтетических или минеральных волокон, так как они более износоустойчивы. Полиспасты со стальными тросами и многожелобковыми шкивами являются неотъемлемыми узлами главных подъемных механизмов всех современных подъемно-транспортных машин и кранов. Шкивы блоков обычно вращаются на роликовых подшипниках, а все их движущиеся поверхности принудительно смазываются.
См. также
МАШИНЫ И МЕХАНИЗМЫ .
ЛИТЕРАТУРА
Платонов П.Н., Куценко К.И. Подъемно-транспортные и подъемно-разгрузочные устройства. М., 1972 Александров М.П. Подъемно-транспортные машины. М., 1985
Энциклопедия Кольера. — Открытое общество
.
2000
.
Смотреть что такое «БЛОКИ И ПОЛИСПАСТЫ» в других словарях:
Механические устройства, облегчающие труд и повышающие его производительность. Машины могут быть разной степени сложности от простой одноколесной тачки до лифтов, автомобилей, печатных, текстильных, вычислительных машин. Энергетические машины… … Энциклопедия Кольера
Замена ручных средств труда машинами и механизмами с применением для их действия различных видов энергии, тяги в отраслях материального производства или процессах трудовой деятельности. М. п. охватывает также сферу умственного труда (см … Большая советская энциклопедия
Под этим именем подразумеваются следующие механизмы, описание и объяснение действия которых можно найти во всех элементарных курсах физики и механики: рычаг, блоки, полиспасты, ворот, наклонная плоскость, клин и винт. Блоки и ворот основаны на… …
Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Простая машина, состоящая из деревянного или металлического круга, обращающегося на своей оси. На наружном ободе круга сделан желоб, по которому могут двигаться веревка, цепь или ремень, ось блока помещается в обоймицах, прикрепленных на балке… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Сложный состоит из соединения нескольких подвижных блоков. Дляравновесия необходимо, чтобы подымающая сила Р относилась ксопротивлению Q, как 1:2 в степени числа блоков, т. е, если блоков 2, тосила P:Q=1:22 или P:Q=1:4. Напр., имеем два блока,… … Энциклопедия Брокгауза и Ефрона
Кран на строящемся здании КАТЭКНИИуголь … Википедия
Машина грузоподьемная
— – устройство для перемещения груза или людей в вертик. или близкой к ней наклонной плоскости (грузовые и пасс. лифты, краны, шахтные, строит. и др. подъёмники). Под термином “Г. м.” понимают разл. по конструкции и кинематич.… …
Оборудование такелажное
— – совокупность устройств: лебёдки, полиспасты, домкраты, тельферы, тали, применяемые как в комплекте с простейшими грузоподъёмными устройствами, так и самостоятельно. [ГОСТ 27555 87] Рубрика термина: Грузоподъемные механизмы Рубрики… … Энциклопедия терминов, определений и пояснений строительных материалов
Полиспаст
— это грузоподъёмное устройство, состоящее из нескольких подвижных и неподвижных блоков огибаемых веревкой, канатом или тросом, позволяющее поднимать грузы с усилием в несколько раз меньшим, чем вес поднимаемого груза.
Любой полиспаст дает определенный выигрыш в усилии для поднятия груза.
В любой подвижной системе состоящей из веревки и блоков неизбежны потери на трение.
В этой части для облегчения расчетов неизбежные потери на трение не учитываются и за основу берется
Теоретически Возможный Выигрыш в Усилии или сокращенно ТВ теоретический выигрыш).
Примечание:
разумеется, в реальной работе с полиспастами трением пренебречь невозможно. Подробнее об этом и об основных способах снижения потерь на трение будет сказано в следующей части «Практические советы по работе с полиспастами»
Основы построения полиспастов
Если закрепить веревку (трос) на грузе, перекинуть её через блок, закрепленный на станции (далее стационарный или неподвижный блок) и потянуть вниз, то для поднятия груза необходимо приложить усилие равное массе груза. Выигрыша в усилии нет
Для того чтобы поднять груз на 1 метр необходимо протянуть через блок 1 метр веревки.
Это так называемая схема 1:1
Веревка (трос) закреплена на станции и пропущена через блок на грузе. При такой схеме для поднятия груза необходимо усилие в 2 раза меньше чем его масса. Выигрыш в усилии 2:1. Ролик движется вместе с грузом вверх. Для того чтобы поднять груз на 1 метр необходимо протянуть через ролик 2 метра веревки.
Это схема самого простого полиспаста 2:1
Рисунки №№ 1 и 2 иллюстрируют следующие Основные Правила Полиспастов
:
Правило №1.
Выигрыш в усилии дают только ДВИЖУЩИЕСЯ ролики, закрепленные непосредственно на грузе или на веревке идущей от груза.
СТАЦИОНАРНЫЕ ролики служат лишь для изменения направления движения веревки и ВЫИГРЫША В УСИЛИИ НЕ ДАЮТ.
Правило №2.
Во сколько раз выигрываем в усилии – во столько же раз проигрываем в расстоянии.
Например: если в показанном на рис. 2 полиспасте 2:1 на каждый метр подъема груза вверх надо протянуть через систему 2 метра веревки, то в полиспасте 6:1 – соответственно 6 метров.
Практический вывод – чем «сильнее» полиспаст – тем медленнее поднимается груз.
Продолжая добавлять стационарные ролики на станцию и подвижные ролики на груз, мы получим так называемые простые полиспасты разных усилий:
Примеры простых полиспастов Рис. 3, 4.
Правило № 3
Расчет теоретического выигрыша в усилии в простых полиспастах.
Здесь все достаточно просто и наглядно.
Если необходимо определить ТВ уже готового полиспаста,
То нужно посчитать количество прядей веревки, идущих от груза вверх.
Если подвижные ролики закреплены не на самом грузе, а на веревке, идущей от груза (как на рис. 6) – то пряди считаются от точки закрепления роликов. Рисунки 5, 6.
Полужирное начертание
Расчет ТВ при сборке простого полиспаста
В простых полиспастах, каждый подвижный ролик (закрепленный на грузе), добавленный в систему добавочно дает двукратный ТВ.
Добавочное усилие СКЛАДЫВАЕТСЯ с предыдущим.
Пример: если мы начали с полиспаста 2:1, то, добавив еще один подвижный ролик, мы получим 2:1 + 2:1 = 4:1; Добавив еще один ролик – получим 2:1 + 2:1+2:1= 6:1 и т.д.
Рисунки 7,8.
В зависимости от того, где закреплен конец грузовой веревки (на станции или на грузе) простые полиспасты подразделяются на четные и нечетные.
Если конец веревки закреплен на станции,
то все последующие полиспасты будут ЧЕТНЫЕ: 2:1, 4:1, 6:1 и т.д.
Рисунок 7.
Если конец грузовой веревки закреплен на грузе,
то будут получаться НЕЧЕТНЫЕ полиспасты: 3:1, 5:1 и т.д.
Рисунок 8.
Кроме простых полиспастов в спасательных работах также широко применяются так называемые СЛОЖНЫЕ ПОЛИСПАСТЫ.
Сложный полиспаст
Сложный полиспаст – это система, в которой один простой полиспаст, тянет за другой простой
полиспаст.
Таким образом могут быть соединены 2, 3 и более полиспастов.
На Рисунке 9 приведены конструкции наиболее употребительных в спасательной практике сложных полиспастов.
Правило №4.
Расчет ТВ сложного полиспаста.
Для расчета теоретического выигрыша в усилии при использовании сложного полиспаста необходимо
умножить значения простых полиспастов, из которых он состоит.
Пример на рис. 10. 2:1 тянет за 3:1=6:1.
Пример на рис. 11. 3:1 тянет за 3:1= 9:1.
Расчет усилия каждого из простых полиспастов, входящих в состав сложного производиться по правилу простых полиспастов.
Количества прядей считается от точки крепления полиспаста к грузу или грузовой веревки, выходящей из другого полиспаста.
Примеры на рис. 10 и 11.
На рисунке 9 показаны практически все основные виды полиспастов, используемые в спасательных работах.
Как показывает практика в большинстве случае этих конструкций вполне достаточно для выполнения любых задач.
Далее в тексте будут показаны еще несколько вариантов.
Разумеется, существуют и другие, более сложные, системы полиспастов. Но они редко применяются спасательной практике и в данной статье не рассматриваются.
Все показанные выше конструкции полиспастов можно очень легко разучить в домашних условиях, подвесив какой-то груз, скажем, на турнике.
Для этого вполне достаточно иметь отрезок веревки или репшнура, несколько карабинов (с роликами или без) и схватывающих (зажимов).
Очень рекомендую всем тем, кто собирается работать с настоящими полиспастами. На своем опыте и опыте моих учеников знаю, что после такой отработки гораздо меньше ошибок и путаницы в реальных условиях.
Комплексные полиспасты
Комплексные полиспасты не являются ни простыми, ни сложными – это отдельный вид.
Отличительная особенность комплексных полиспастов – наличие в системе роликов движущихся навстречу грузу.
В этом заключается главное преимущество комплексных полиспастов в тех случаях, когда станция расположена выше спасателей и надо тянуть полиспаст вниз.
На Рис 12. приведены две схемы комплексных полиспастов, применяемых в спасработах.
Существуют и другие схемы, но они не находят применения в спасательной практике и в данной статье не рассматриваются.
Поднимать тяжелые грузы на высоту, пусть даже не очень большую – задача для человека очень сложная. Однако придумано достаточно много различных механизмов и приспособлений, облегчающих этот процесс. К числу таких механизмов в обязательном порядке следует отнести полиспаст. В нашей статье подробнее поговорим об этом устройстве, а также расскажем о технологии создания полиспаста дома.
Как можно упростить подъем грузов
Полиспаст представляет собой систему, которая состоит из неподвижных и подвижных блоков, соединенных друг с другом цепными или канатными передачами. Это устройство было изобретено очень давно, ведь еще древние греки и римляне пользовались аналогичными механизмами. За последующие тысячелетия составляющие данного аппарата и его предназначение практически не изменились. На сегодняшний день это устройство используется практически в первозданном виде, лишь с небольшими изменениями.
Схема работы полиспаста
Полиспасты применяются в основном в стреловых механизмах строительных кранов. К полиспастам, несмотря на все их многообразие, предъявляют два основных требования: увеличение скорости (за это отвечают скоростные механизмы) и увеличение силы (так называемые силовые полиспасты). В подъемниках обычно используются первые, тогда как вторые нашли применение в подъемных кранах. Следует отметить и тот важный факт, что схемы силовых и скоростных устройств являются практически полностью взаимно обратными.
Обычный полиспаст представляет собой устройство, основными компонентами которого являются:
- система блоков с подвижными осями;
- блоки с неподвижными осями;
- обводочные барабаны;
- обводные блоки.
За счет эффективного взаимодействия блоков и веревок появляется возможность существенно выиграть в силе. В силе мы выигрываем во столько раз, во сколько раз проигрываем в длине. Это одно из фундаментальных правил механики, благодаря которому обычный человек может с легкостью поднимать тяжелые массы, затрачивая минимум физических усилий.
Гораздо выгоднее приобрести данный прибор или сделать его самостоятельно, нежели брать в аренду подъемные краны или аналогичные механизмы. Особенность устройства заключается в том, что одна из сторон, которую закрепляют на грузе, находится в подвижном состоянии, тогда как вторая сторона, крепящаяся к опоре, является статичной. Именно подвижные блоки обеспечивают такой существенный выигрыш в силе. Статические же блоки требуются для контроля траектории движения веревки и самого груза.
Существуют различные виды полиспастов, которые отличаются по кратности, четности и сложности. Показатель кратности определяет, во сколько раз вы выиграете в силе, используя данное приспособление. Так, покупая механизм с кратностью 6, вы теоретически имеете выигрыш в силе в 6 раз.
Простые и сложные полиспасты – разбираемся в их конструкции
Для начала поговорим о простых механизмах. Получить такое устройство можно, добавив блоки на груз и опору. Четный полиспаст – это устройство, в котором веревка прикрепляется к опоре. Если же требуется нечетный, то веревка устанавливается на подвижной точке поднимаемого предмета. Добавление блока увеличивает кратность прибора на два пункта.
Так, чтобы вручную сделать полиспаст для обычной лебедки, кратность которого составляет 2, достаточно использовать только один подвижный блок, крепящийся к грузу. Веревка же при этом крепится на опоре. В результате мы будем иметь четный полиспаст с кратностью 2. Сложные полиспасты включают несколько простых механизмов. Естественно, такое устройство дает существенно больший выигрыш в силе, который можно рассчитать путем перемножения кратностей каждого из используемых полиспастов. При этом не стоит забывать о силе трения, из-за действия которой происходит небольшая потеря в мощности устройства.
Есть несколько способов уменьшить силу трения веревки. Самый эффективный заключается в том, чтобы использовать ролики как можно большего радиуса. Ведь чем больше радиус, тем сила трения оказывает меньше воздействия на веревку и подъемный механизм в целом.
Как на эффективность работы влияет веревка
Избежать зажатия и перекручивания веревки можно, если использовать дополнительные приспособления, к примеру, монтажные платы, которые позволяют разнести ролики относительно друг друга. Категорически не рекомендуем применять в полиспастах растягивающиеся веревки, поскольку в сравнении с обычными статическими изделиями они очень серьезно проигрывают в эффективности. Собирая блок для подъема грузов, специалисты используют и грузовую, и отдельную веревки, которые прикрепляются к объекту независимо от подъемного приспособления.
Эксплуатация отдельных веревок дает некоторое преимущество. Суть заключается в том, что отдельная веревка предоставляет возможность предварительно или заранее собрать всю конструкцию. К тому же, можно существенно облегчить проход узлов, поскольку используется вся длина веревки. Единственный недостаток – это невозможность фиксировать груз в автоматическом режиме. Грузовые же веревки могут похвастаться именно такой особенностью, поэтому в случае возникновения необходимости в автофиксации груза воспользуйтесь именно грузовой веревкой.
Большое значение имеет обратный ход. Данный эффект является неизбежным, поскольку в момент снятия, а также при перехватывании веревки или остановке на отдых груз непременно двигается в обратную сторону. От качества используемых блоков, а также всего устройства в целом зависит то, насколько сильно груз уйдет обратно. Можно предотвратить возникновение данного явления, если приобрести специальные ролики, обеспечивающие пропуск веревки исключительно в одном направлении.
Расскажем немного о том, как правильно крепить грузовую веревку к подъемному механизму. Далеко не всегда даже самый предусмотрительный мастер обладает веревкой необходимой длины, которая требуется для крепления динамической части блока. Поэтому разработано несколько способов крепления механизма:
- При помощи схватывающих узлов. Эти узлы завязываются в пять оборотов из репшнуров, сечение которых не превышает 8 мм. Использование подобных узлов является самым эффективным и, соответственно, распространенным. По словам специалистов, узлы являются очень прочными и надежными. Лишь нагрузка свыше 13 кН способна привести к сползанию такого узла. Важно то, что даже при сползании узел никоим образом не деформирует веревку, оставляя ее в целости и сохранности.
- Применение зажимов общего назначения. Данные приспособления можно использовать даже в сложных климатических условиях, к примеру, на мокрых или обледенелых веревках. Нагрузка в 7 кН способна привести к сползанию зажима, что приводит к повреждению веревки, хотя и не очень сильному.
- Персональные зажимы. Они применяются только при небольших работах, поскольку нагрузка свыше 4 кН приводит к сползанию зажима и последующему обрыву веревки.
Запасовка – изучаем самые популярные схемы
Данная технологическая операция предназначена для изменения расстояния между блоками, а также для изменения положения указанных блоков. Необходимость запасовки обусловлена изменением высоты или скорости подъема предметов посредством установки конкретной схемы прохождения веревки по блокам и роликам механизма.
Используемая схема во многом зависит от типа грузоподъемного прибора. Запасовка для лебедок проводится только с целью изменения длины вылета стрелы. Выполняется же она путем изменения взаимного расположения направляющих блоков. Очень часто такую операцию проводят в грузовых кранах, где она требуется для предотвращения такого эффекта, как криволинейность перемещения тяжестей.
Запасовки, в зависимости от используемых схем, подразделяются на следующие категории:
- Однократная. Такой тип нашел применение в грузоподъемных кранах стрелкового типа, где крюк необходимо подвести на одной веревке каната. После этого требуется последовательно проводить статические блоки. В финальной стадии крюк наматывается на барабан. Как показывает практика, данный тип запасовки является самым неэффективным.
- Двухкратная. Этот тип применяется в кранах, которые оборудованы балочной и подъемной стрелой. В этом случае требуется неподвижные блоки установить на головке стрелы, тогда как на грузовой лебедке крепится другой конец веревки.
- Четырехкратная. Востребована среди полиспастов, которые используются для поднятия предметов огромной массы. Обычно применяют одну из схем запасовки, которые были описаны ранее, с той лишь разницей, что они используются отдельно для каждого блока крюковой подвески.
Делаем полиспаст из бумажных стаканов и шестеренок
Устройства, используемые в строительстве, отличаются большой сложностью, что и логично, ведь здесь требуется поднимать большие грузы на достаточно большую высоту. Разобраться в их конструктивных особенностях бывает весьма проблематично. Чего нельзя сказать о домашних полиспастах, которые применяются в быту. Они настолько просты и понятны, что соорудить полиспаст своими руками сможет любой человек. Для этого нам потребуются следующие приспособления:
- 1.
несколько стаканов из бумаги; - 2.
ножницы; - 3.
шнурок или крепкая нить, выступающая в качестве веревки; - 4.
пластилин; - 5.
пластиковые вешалки.
В первую очередь потребуется сделать корзину, в которой будет перемещаться груз. Для этих целей будем использовать бумажные стаканы, через которые продеваем веревку. Сам же полиспаст собираем из вешалок. Веревку или нить фиксируем на верхней части вешалки, после чего несколько раз наматываем на перекладину. Полученную из стаканов корзинку следует подвесить на нижней вешалке за крючок. В принципе, на этом сбор полиспаста можно считать оконченным. Для поднятия грузов достаточно лишь правильно пользоваться механизмом. Для этого понадобится тянуть за свободный конец нитки, что приведет к соединению вешалок. Теперь можно попробовать поднять тяжелые предметы на высоту.
Существует еще один способ изготовления полиспаста своими руками, который несколько сложнее, но отличается большей эффективностью и надежностью конструкции. Здесь нам потребуются подшипники, шестеренка, крючок, тросы с блоками, а также резьбовая шпилька. Сначала на шпильке закрепляем подшипники, после чего устанавливаем шестеренку на конец шпильки, чтобы было удобнее и проще пользоваться самодельным полиспастом. Остается только перекинуть трос через шестеренки и закрепить его, свободный же конец будет оборудован крюком, который необходим для подъема предметов.
Напоследок напомним, что при работе с любыми полиспастами, купленными в магазине или сделанными дома, обязательно следует помнить о технике безопасности. Необходимо тщательно проверить конструкцию на прочность и целостность. Сами же грузы следует поднимать плавно и осторожно, не располагаясь в этом время под подвешенным предметом.
Полиспасты
К
атегория:
Строительные машины и их эксплуатация
Полиспасты
Полиспастом называется система, состоящая из нескольких подвижных и неподвижных блоков и каната, последовательно огибающего все блоки. Один конец полиспаста закрепляется на обойме подвижных или неподвижных блоков, а другой — на барабане лебедки.
Рис. 1. Схемы канатных полиспастов
а — трехкратный полиспаст; б, в, г — четырех-, пяти- и шестикратные
полиспасты
Рис. 2. Схема сдвоенного полиспаста
Число рабочих ветвей (кратность полиспаста) равно числу блоков, когда канат сбегает с неподвижного блока полиспаста, и числу блоков полиспаста плюс единица, когда канат сбегает с подвижного блока.
Рис. 3. Схема полиспаста обратного действия
Полиспаст — простейшее грузоподъемное устройство, состоящее из блоков, соединенных между собой канатом. С помощью полиспаста можно поднимать груз или перемещать его по горизонтали. Полиспаст дает выигрыш в силе за счет проигрыша в скорости: во сколько раз выигрывается в силе, во столько раз проигрывается в скорости.
Полиспаст состоит из двух блоков: неподвижного, прикрепляемого к подъемному приспособлению (балке, мачте, треноге), и подвижного, который крепится к поднимаемому грузу. Оба блока соединяются между собой канатом. Канат, последовательно огибая все ролики блоков, одним концом крепится к верхнему неподвижному блоку. Другой его конец через отводные блоки крепится к барабану лебедки. Если число рабочих нитей полиспаста, идущих к подвижному блоку, четное, то конец каната закрепляют к верхнему неподвижному блоку, а если нечетное — к нижнему подвижному.
Если нить полиспаста сбегает не с нижнего блока, а с верхнего, то верхний блок неподвижного блока считается отводным. Это условие необходимо учитывать при расчете полиспастов.
Полиспаст запасовывают двумя способами. По первому способу, применяемому при оснастке многониточных полиспастов большой грузоподъемности, неподвижный блок без канатов поднимают в рабочее положение и закрепляют; нижний подвижный блок находится внизу. Затем через ручьи (канавки) роликов верхнего и нижнего блоков последовательно пропускают канат. Конец каната закрепляют за верхний или нижний блок в зависимости от принятой схемы запасовки полиспаста. Через ручьи роликов канат часто пропускают с помощью ручных рычажных лебедок, что значительно облегчает работу по запасовке полиспаста.
В последнее время при оснастке многониточного полиспаста применяют вспомогательный тонкий легкий стальной канат диаметром 5-6’мм, который пропускают через ролики блоков вручную. К одному концу тонкого каната прикрепляют конец рабочего каната, второй его конец закрепляют на барабане лебедки. Во время работы лебедки рабочий канат протягивается через ролики блоков полиспаста.
Во время запасовки полиспаста необходимо наблюдать за тем, чтобы узел соединения тонкого и толстого канатов при перемещении свободно проходил через ролики блоков.
При втором способе полиспаст оснащают внизу (на дощатом настиле или бетонном полу), а затем в готовом виде поднимают и закрепляют в необходимом месте. Блоки укладывают плашмя на расстоянии 3-4 м друг от друга и закрепляют.
Канат начинают протягивать с того ролика, с которого сходит сбегающая нить, ведущая к лебедке. Когда канат обогнет последний ролик блока, его конец закрепляют к одному из блоков. После закрепления мертвой нити полиспаст устанавливают в исходное положение.
В некоторых случаях поднимают один верхний неподвижный блок или весь полиспаст с помощью вспомогательного однорольного блока или полиспаста небольшой грузоподъемности. Сначала закрепляют вспомогательный блок, через него пропускают канат, к которому крепится основной блок полиспаста. Второй конец каната закрепляют на лебедке, с помощью которой будут поднимать полиспаст. Закрепляют основной блок полиспаста из люльки или с подмостей.
На рис. 4 приведены схемы запасовки полиспастов с двух-, четырех-, пяти- и шестирольными блоками.
При выполнении такелажных работ часто встречаются случаи, когда в наличии имеются блоки различной грузоподъемности и канаты. Чтобы правильно подобрать канат для оснащения полиспаста, а также лебедку с необходимой тяговой силой, такелажнику необходимо знать расчет полиспастов.
Расчет полиспастов сводится к определению усилий в нитях полиспастов. Обычно сами блоки рассчитывать не приходится, так как они рассчитываются при проектировании, и каждый из них имеет определенную грузоподъемность.
При такелажных работах расчет начинают с выяснения грузоподъемности имеющихся блоков, которая должна соответствовать весу поднимаемого груза. Например, по схеме (рис. 22, а) для подъема груза весом 20 т необходимы блоки грузоподъемностью 20 т. На схеме верхний блок трехрольный, но для того, чтобы выделить отводной, он условно показан двухрольным.
Рис. 4. Схемы запасовки полиспастов с числом рабочих нитей:
а — шесть с тремя отводными однорольными блоками, б — три, в — четыре, г — пять, д — шесть, е — семь, ж — восемь, з — десять, и — одиннадцать, к — двенадцать, S0, 1, 2, 3, 4, 5.6,7 — нити полиспаста
Подвеска, на которой подвешен верхний блок полиспаста, рассчитывается на всю нагрузку, которую поднимает полиспаст: вес двух блоков, вес каната, а также усилие в сбегающей нити грузового полиспаста.
При расчете полиспастов рассчитывают закрепление верхнего блока полиспаста к механизму или приспособлению.
Если допустить, что обе нити идут вертикально, то первый отводной ролик закрепляется на усилие, равное сумме усилий в 5-й и 6-й нитях: 3,68+3,82=7,5 тс. Закрепление второго отводного блбка рассчитывается на усилия в 6-й и 7-й нитях.
Поскольку усилия в обеих нитях и угол между ними могут быть различными, усилие, на которое рассчитывается закрепление блока, определяют по правилу параллелограмма.
Пример. Подобрать полиспаст для подъема груза весом 10 т и канат необходимого сечения для подвески полиспаста на высоте 18 м.
Подбираем два блока для полиспастов. По табл. 11 выбираем для нижнего подвижного блока двухрольный блок грузоподъемностью 10 тс, для верхнего неподвижного блока — трехрольный блок грузоподъемностью 15 тс.
По максимальному усилию в 6-й нити Se подбираем сечение каната. Наименьший допускаемый коэффициент запаса прочности канатов k для грузового полиспаста с машинным приводом при легком режиме работы равен 5.
Поскольку может быть только четное число нитей, то принимаем для подвески восемь нитей.
При отсутствии блоков необходимой грузоподъемности применяют сдвоенные полиспасты, например сдвоенный полиспаст с уравнительным роликом и одной или Двумя приводными лебедками показан на рис. 5.
Сдвоенный полиспаст с одной приводной лебедкой рассчитывают как и одинарный с соответствующим числом рабочих нитей.
Полиспаст с двумя приводными лебедками рассчитывают как два самостоятельно работающих полиспаста,
Рис. 5. Схемы запасовки сдвоенных полиспастов с одной (а) и двумя (б) приводными лебедками:
1 — уравнительный блок, 2 — неподвижный блок, 3 — подвижный блок, 4 — траверса, 5 — подвеска
Полиспаст представляет собой простейшее грузоподъемное устройство, состоящее из системы подвижных и неподвижных блоков (роликов), огибаемых гибким органом (обычно канатом). Полиспасты применяются как самостоятельные механизмы в сочетании с лебедками и как элементы сложных грузоподъемных машин (кранов).
Блоки (ролики) полиспаста размещаются в двух обоймах — подвижной и неподвижной — и последовательно огибаются одним канатом, к свободному концу или обоим концам которого прикладывается тяговое усилие. Неподвижная обойма блоков (роликов) крепится к несущей конструкции (мачте, стреле и т. п.), подвижная снабжается грузозахватным органом (крюком, петлей, скобой).
Рис. 6. Схемы полиспастов
а — в четыре нитки; б — в шесть ниток; 1 — неподвижные блоки; 2 — подвижные блоки; 3 — отводной блок; 4 — канат
Полиспасты используются для выигрыша в силе (реже скорости). Выигрыш в силе тем больше, тем больше кратность полиспаста, равная числу рабочих ветвей каната, на которых подвешена подвижная обойма блоков полиспаста.
Рис. 7. Расчетные схемы полиспастов
1. Определить усилие 5Л в канате, идущем на лебедку, при подъеме груза весом Q = 20 т полиспастом, выполненным по схеме I. Блоки (ролики) полиспаста установлены на подшипниках качения (/j = 1,02), отводные ролики — на бронзовых втулках (= 1,04).
2. Определить усилие 5Л в канате, идущем на лебедку, при подъеме груза весом 20 т полиспастом, выполненным по схеме II. Блоки (ролики) приняты на бронзовых втулках (= 1,04).
3. Определить, какой груз Q можно поднять лебедкой с тяговым усилием 5Л = 1,5 тс и полиспастом, выполненным по схеме III
. Блоки (ролики) приняты на бронзовых втулках.
К
атегория:
—
Строительные машины и их эксплуатация
Простые и сложные полиспасты, схемы полиспастов, использование
Полиспасты, это система прикрепленных к вытаскиваемой технике и анкерам блоков, соединенных между собой стальным канатом (тросом). Полиспасты предназначен для увеличения тягового усилия средства эвакуации. При этом скорость и путь перемещения вытаскиваемой техники уменьшаются. Полиспасты используются в тех случаях, когда тяговое усилие имеющихся тяговых средств меньше усилия, потребного для вытаскивания застрявшей техники.
Простые и сложные полиспасты, схема простых и сложных полиспастов из одно и двухроликовых блоков, вытаскивание застрявшей техники с использованием полиспастов.
По устройству полиспасты делятся на простые и сложные. В простом полиспасте все ролики блоков огибаются одним тросом. В сложном полиспасте, несколько простых полиспастов соединены между собой. На схеме ниже представлены простые и сложные полиспасты из одно, двухроликовых блоков и их комбинаций, применяемых в практике эвакуации различной застрявшей техники.
Схема простых и сложных полиспастов из одно и двухроликовых блоков.
Степень увеличения прикладываемого тягового усилия называется передаточным числом или кратностью полиспаста. Передаточное число полиспаста i определяется по формуле
i = Q/Pn
где Q — тяговое усилие, необходимое для вытаскивания застрявшего объекта, кН (тс).
Р — прикладываемое тяговое усилие на тросе лебедки тягача, кН (тс)/
n — коэффициент полезного действия полиспаста, зависящий от жесткости троса и трения в блоках.
Коэффициент полезного действия (КПД) однороликового блока на подшипнике скольжения имеет значение n=0,96, а на подшипнике качения n=0,98. Коэффициент полезного действия простого полиспаста можно принимать равным произведению КПД всех блоков, входящих в систему. Сложного полиспаста — произведению КПД простых полиспастов, из которых он состоит.
При известной скорости V1 перемещение конца троса, к которому приложено тяговое усилие, скорость V2 передвижения вытаскиваемого объекта определяется из выражения.
V1 = V2/n
Путь, пройденный вытаскиваемым объектом L2, определяется по формуле.
L2 = L1/i
где L1 — путь, проходимый концом троса эвакуационного тягача.
Полиспасты необходимо монтировать так, чтобы трос при переходе с одного ролика на другой не менял направление изгиба. В противном случае значительно уменьшается срок службы троса и КПД полиспаста.
Для получения максимального передаточного числа полиспаст лучше монтировать так, чтобы конец тягового троса сбегал с подвижного блока. При этом если число роликов блоков четное, анкерный конец троса следует крепить к подвижному блоку. Если нечетное — к неподвижному блоку (у анкерного устройства).
Вытаскивание застрявшей техники с использованием полиспастов.
Вытаскивание застрявшей техники с использованием полиспастов применяется при среднем, тяжелом и особо тяжелом застревании, когда возможности других средств и способов недостаточны. Или их применение невозможно по условиям доступности объектов.
Полиспасты можно собирать из элементов такелажного оборудования многоцелевых автомобилей и транспортеров — тягачей с лебедками, эвакуационных тягачей и табельных групповых такелажных комплектов. А также из подручных элементов, прочность которых достаточна для реализации необходимого тягового усилия. Схема полиспаста выбирается исходя из возможностей величины сил сопротивления перемещению объектов и тяговых возможностей выделенного средства эвакуации.
Размеры полиспаста должны обеспечивать возможность вытаскивания объекта за один прием. Если это невозможно, то вместо грунтовых якорей можно использовать подвижные анкеры (тягачи, тракторы). Это позволяет после подтягивания полиспаста на всю длину троса производить его растягивание со сменой места установки анкеров и средств эвакуации.
Применение подвижного анкера для растягивания полиспастов.
Для раскладки полиспаста необходимо:
— Выложить на грунт возле застрявшей техники подвижные блоки и разобрать.
— Выложить неподвижные блоки у средства эвакуации и (или) в местах соединения с якорем.
— Выдать трос лебедки на необходимую длину и заложить его в блоки.
— Собрать блоки, сцепить их с застрявшим автомобилем буксирными тросами и закрепить анкерный конец троса на одном из блоков в соответствии со схемой полиспаста.
— Растянуть полиспаст с помощью средства эвакуации на предельное расстояние. Отсоединить неподвижные блоки от буксирных крюков, если сборка полиспаста осуществляется рядом с объектом.
— Собрать и подсоединить к неподвижным блокам якоря. Закрепив их затем при помощи штырей на грунте.
— Ходовой конец троса полиспаста подсоединить к средству эвакуации. Если трос не является тросом лебедки.
По материалам книги «Ремонт военной автомобильной техники».
Тарасенко П.Н.
Похожие статьи:
- Крупнозвенчатые и мелкозвенчатые цепи противоскольжения, другие съемные приспособления для повышения проходимости в условиях грунтовых дорог и бездорожья.
- Новый Land Rover Defender 2019, особенности конструкции, трансмиссии и подвески, двигатели, оснащение и оборудование салона.
- Обновленный УАЗ Патриот с коробкой-автоматом Punch Powerglide 6L50, отличия и обновления в экстерьере и интерьере, обзор.
- УАЗ Патриот с автоматической коробкой передач Punch 6L50, особенности конструкции, обновления, переделки и доработки, обзор.
- Походная портативная ветровая электростанция, устройство, размеры и чертежи, обеспечение электричеством в походных условиях от ветра, обзор.
- Обзор австрийской армейской плащ-палатки, варианты ее установки и использования.
Силовой полиспаст. Скоростной полиспаст. Схемы полиспастов.
Полиспаст — система подвижных и неподвижных блоков, соединенных гибкой связью (канатом или цепью), применяемая для увеличения силы — силовой полиспаст или скорости — скоростной полиспаст. Обычно в грузоподъемных машинах применяют силовые полиспасты, позволяющие уменьшить натяжение гибкого грузового органа, момент от веса груза на барабане и передаточное число механизма. Скоростные полиспасты, позволяющие получить повышение скорости перемещения груза при малых скоростях приводного элемента, применяют значительно реже, например, в гидравлических или пневматических подъемниках. В полиспаст входят подвижные блоки, ось которых перемещается в пространстве, и неподвижные блоки.
Схемы полиспастов
Рис. 1: а – одинарный двухкратный; б – одинарный трехкратный; в, д – сдвоенные двухкратные; г – сдвоенный трехкратный
В одинарных полиспастах (рис. 1, а, б) один конец каната закреплен на барабане, а второй конец закрепляется при четной кратности (а) на неподвижном элементе конструкции, а при нечетной кратности (б) — на крюковой обойме. При наматывании или сматывании каната с барабана, если отсутствуют обводные блоки, то есть канат с блока крюковой обоймы непосредственно переходит на барабан, происходит перемещение груза не только по вертикали, но и по горизонтали.
Для обеспечения строго вертикального подъема груза применяют сдвоенные полиспасты (рис. 1, в-д), состоящие из двух одинарных полиспастов. В этом случае на барабане закрепляют оба конца каната. Для обеспечения нормального положения крюковой подвески при неравномерной вытяжке ветвей каната обоих полиспастов применяют установку балансира или, что чаще, уравнительного блока C (рис. 1, в). При установке уравнительного блока можно использовать целый канат без дополнительных креплений на балансирах. Однако осмотр и контроль состояния каната на этом блоке вследствие малого угла поворота затруднительны. Поэтому в кранах с тяжелым и весьма тяжелым режимом работы предпочтительно применять уравнительные балансиры А (рис. 73, д).
Уравнительный блок C при подъеме и спуске груза обычно не вращается и служит лишь для уравнивания длины ветвей обоих полиспастов при неравномерной вытяжке каната, поэтому согласно правилам Госгортехнадзора допускается его диаметр принимать равным 0,8 диаметра, определенного по формуле, а у электроталей и стреловых самоходных кранов — равным 0,6 этого диаметра. При четной кратности полиспаста он располагается среди неподвижных блоков, а при нечетной — среди подвижных блоков крюковой подвески.
Расчет сдвоенного полиспаста ведут аналогично расчету для одинарного полиспаста, причем каждый полиспаст рассматривают отдельно при действии на него половины общей нагрузки. Если h — высота подъема груза, то длина каната одинарного полиспаста, наматываемого на барабан, L = ah, где a — кратность полиспаста. Кратность сдвоенного полиспаста равна кратности одинарных полиспастов, составляющих его. Для сдвоенного полиспаста величина L соответствует длине каната, наматываемого на одну половину барабана.
Скорость подъема груза υгр и скорость каната, навиваемого на барабан связаны между собой соотношением υ = aυгр, где υ = πD2nбар/60, м/с; D2 — диаметр барабана, измеренный по центру каната; nбар — частота вращения барабана, об/мин.
Силовой полиспаст
В силовых полиспастах грузоподъемных машин можно использовать канаты небольшого диаметра и, следовательно, уменьшить диаметры барабана и блоков, снизить массу и габариты машины. Увеличение кратности полиспаста позволяет снизить передаточное число редуктора, но одновременно требует большей длины каната и канатоемкости барабана. Увеличение числа блоков при повышении кратности полиспаста вызывает увеличение потерь и возрастание мощности, затрачиваемой на подъем груза, а также увеличивает число перегибов каната, что вызывает некоторое снижение его срока службы. В то же время, как уже указывалось, канат при большой кратности полиспаста имеет небольшой диаметр и, следовательно, большую гибкость, что способствует увеличению долговечности. Выбор каната, типа и кратности полиспаста связан с проблемой общей компоновки механизма и с его параметрами, в частности с передаточным числом механизма, габаритами и массой, что в свою очередь влияет на размеры всей грузоподъемной машины и на размеры здания, где эта машина устанавливается.
Так, если для подъема груза одного и того же веса Gгр с одинаковой заданной скоростью подъема υгр применять полиспасты различной кратности, то параметры механизмов подъема будут различными. Статическая мощность этих механизмов Nст = Gгрυгр/1000ηп, необходимая для подъема груза, будет другой только из-за различия в значениях КПД, и при кратностях, отличающихся незначительно (например, механизмы с кратностью два и четыре), потребную мощность двигателя можно считать одинаковой. Так как максимальные силы в канатах полиспастов изменяются практически обратно пропорционально кратности полиспаста, то с увеличением кратности уменьшаются нагрузка в канате и его диаметр, а также и диаметр барабана. Скорость наматывания каната на барабан изменяется прямо пропорционально кратности, и в полиспасте с большей кратностью она имеет большее значение. Тогда при одинаковой заданной скорости подъема и одинаковой частоте вращения ротора электродвигателя передаточное число редуктора, соединяющего двигатель с барабаном, оказывается меньше при полиспасте большей кратности благодаря большей скорости навивки каната на барабан и меньшему его диаметру.
Скоростной полиспаст
Скоростной полиспаст (рис. 2) отличается от силового полиспаста тем, что в нем рабочая сила F, обычно развиваемая гидравлическим или пневматическим цилиндром, прикладывается к подвижной обойме, а груз подвешивается к свободному концу каната.
Схема скоростного полиспаста
Рис. 2
Расчет скоростных полиспастов принципиально не отличается от расчета силового полиспаста. При перемещении обоймы полиспаста (точки А на рис. 2) на расстояние h груз проходит путь H = ah, где a — кратность скоростного полиспаста и, следовательно, скорость перемещения груза υгр = aυА, где υА — скорость перемещения обоймы полиспаста.
Сила F, необходимая для подъема груза весом Gгр, определяется по формуле:
Полиспасты
Категория:
Строительные машины и их эксплуатация
Публикация:
Полиспасты
Читать далее:
Полиспасты
Полиспастом называется система, состоящая из нескольких подвижных и неподвижных блоков и каната, последовательно огибающего все блоки. Один конец полиспаста закрепляется на обойме подвижных или неподвижных блоков, а другой — на барабане лебедки.
Рис. 1. Схемы канатных полиспастов
а — трехкратный полиспаст; б, в, г — четырех-, пяти- и шестикратные
полиспасты
Рекламные предложения на основе ваших интересов:
Рис. 2. Схема сдвоенного полиспаста
Число рабочих ветвей (кратность полиспаста) равно числу блоков, когда канат сбегает с неподвижного блока полиспаста, и числу блоков полиспаста плюс единица, когда канат сбегает с подвижного блока.
Рис. 3. Схема полиспаста обратного действия
—
Полиспаст — простейшее грузоподъемное устройство, состоящее из блоков, соединенных между собой канатом. С помощью полиспаста можно поднимать груз или перемещать его по горизонтали. Полиспаст дает выигрыш в силе за счет проигрыша в скорости: во сколько раз выигрывается в силе, во столько раз проигрывается в скорости.
Полиспаст состоит из двух блоков: неподвижного, прикрепляемого к подъемному приспособлению (балке, мачте, треноге), и подвижного, который крепится к поднимаемому грузу. Оба блока соединяются между собой канатом. Канат, последовательно огибая все ролики блоков, одним концом крепится к верхнему неподвижному блоку. Другой его конец через отводные блоки крепится к барабану лебедки. Если число рабочих нитей полиспаста, идущих к подвижному блоку, четное, то конец каната закрепляют к верхнему неподвижному блоку, а если нечетное — к нижнему подвижному.
Если нить полиспаста сбегает не с нижнего блока, а с верхнего, то верхний блок неподвижного блока считается отводным. Это условие необходимо учитывать при расчете полиспастов.
Полиспаст запасовывают двумя способами. По первому способу, применяемому при оснастке многониточных полиспастов большой грузоподъемности, неподвижный блок без канатов поднимают в рабочее положение и закрепляют; нижний подвижный блок находится внизу. Затем через ручьи (канавки) роликов верхнего и нижнего блоков последовательно пропускают канат. Конец каната закрепляют за верхний или нижний блок в зависимости от принятой схемы запасовки полиспаста. Через ручьи роликов канат часто пропускают с помощью ручных рычажных лебедок, что значительно облегчает работу по запасовке полиспаста.
В последнее время при оснастке многониточного полиспаста применяют вспомогательный тонкий легкий стальной канат диаметром 5—6’мм, который пропускают через ролики блоков вручную. К одному концу тонкого каната прикрепляют конец рабочего каната, второй его конец закрепляют на барабане лебедки. Во время работы лебедки рабочий канат протягивается через ролики блоков полиспаста.
Во время запасовки полиспаста необходимо наблюдать за тем, чтобы узел соединения тонкого и толстого канатов при перемещении свободно проходил через ролики блоков.
При втором способе полиспаст оснащают внизу (на дощатом настиле или бетонном полу), а затем в готовом виде поднимают и закрепляют в необходимом месте. Блоки укладывают плашмя на расстоянии 3—4 м друг от друга и закрепляют.
Канат начинают протягивать с того ролика, с которого сходит сбегающая нить, ведущая к лебедке. Когда канат обогнет последний ролик блока, его конец закрепляют к одному из блоков. После закрепления мертвой нити полиспаст устанавливают в исходное положение.
В некоторых случаях поднимают один верхний неподвижный блок или весь полиспаст с помощью вспомогательного однорольного блока или полиспаста небольшой грузоподъемности. Сначала закрепляют вспомогательный блок, через него пропускают канат, к которому крепится основной блок полиспаста. Второй конец каната закрепляют на лебедке, с помощью которой будут поднимать полиспаст. Закрепляют основной блок полиспаста из люльки или с подмостей.
На рис. 4 приведены схемы запасовки полиспастов с двух-, четырех-, пяти- и шестирольными блоками.
При выполнении такелажных работ часто встречаются случаи, когда в наличии имеются блоки различной грузоподъемности и канаты. Чтобы правильно подобрать канат для оснащения полиспаста, а также лебедку с необходимой тяговой силой, такелажнику необходимо знать расчет полиспастов.
Расчет полиспастов сводится к определению усилий в нитях полиспастов. Обычно сами блоки рассчитывать не приходится, так как они рассчитываются при проектировании, и каждый из них имеет определенную грузоподъемность.
При такелажных работах расчет начинают с выяснения грузоподъемности имеющихся блоков, которая должна соответствовать весу поднимаемого груза. Например, по схеме (рис. 22, а) для подъема груза весом 20 т необходимы блоки грузоподъемностью 20 т. На схеме верхний блок трехрольный, но для того, чтобы выделить отводной, он условно показан двухрольным.
Рис. 4. Схемы запасовки полиспастов с числом рабочих нитей:
а — шесть с тремя отводными однорольными блоками, б — три, в — четыре, г — пять, д — шесть, е — семь, ж — восемь, з — десять, и — одиннадцать, к — двенадцать, S0, 1, 2, 3, 4, 5.6,7 — нити полиспаста
Подвеска, на которой подвешен верхний блок полиспаста, рассчитывается на всю нагрузку, которую поднимает полиспаст: вес двух блоков, вес каната, а также усилие в сбегающей нити грузового полиспаста.
При расчете полиспастов рассчитывают закрепление верхнего блока полиспаста к механизму или приспособлению.
Если допустить, что обе нити идут вертикально, то первый отводной ролик закрепляется на усилие, равное сумме усилий в 5-й и 6-й нитях: 3,68+3,82=7,5 тс. Закрепление второго отводного блбка рассчитывается на усилия в 6-й и 7-й нитях.
Поскольку усилия в обеих нитях и угол между ними могут быть различными, усилие, на которое рассчитывается закрепление блока, определяют по правилу параллелограмма.
Пример. Подобрать полиспаст для подъема груза весом 10 т и канат необходимого сечения для подвески полиспаста на высоте 18 м.
Подбираем два блока для полиспастов. По табл. 11 выбираем для нижнего подвижного блока двухрольный блок грузоподъемностью 10 тс, для верхнего неподвижного блока — трехрольный блок грузоподъемностью 15 тс.
По максимальному усилию в 6-й нити Se подбираем сечение каната. Наименьший допускаемый коэффициент запаса прочности канатов k для грузового полиспаста с машинным приводом при легком режиме работы равен 5.
Поскольку может быть только четное число нитей, то принимаем для подвески восемь нитей.
При отсутствии блоков необходимой грузоподъемности применяют сдвоенные полиспасты, например сдвоенный полиспаст с уравнительным роликом и одной или Двумя приводными лебедками показан на рис. 5.
Сдвоенный полиспаст с одной приводной лебедкой рассчитывают как и одинарный с соответствующим числом рабочих нитей.
Полиспаст с двумя приводными лебедками рассчитывают как два самостоятельно работающих полиспаста,
Рис. 5. Схемы запасовки сдвоенных полиспастов с одной (а) и двумя (б) приводными лебедками:
1 — уравнительный блок, 2 — неподвижный блок, 3 — подвижный блок, 4 — траверса, 5 — подвеска
—
Полиспаст представляет собой простейшее грузоподъемное устройство, состоящее из системы подвижных и неподвижных блоков (роликов), огибаемых гибким органом (обычно канатом). Полиспасты применяются как самостоятельные механизмы в сочетании с лебедками и как элементы сложных грузоподъемных машин (кранов).
Блоки (ролики) полиспаста размещаются в двух обоймах — подвижной и неподвижной — и последовательно огибаются одним канатом, к свободному концу или обоим концам которого прикладывается тяговое усилие. Неподвижная обойма блоков (роликов) крепится к несущей конструкции (мачте, стреле и т. п.), подвижная снабжается грузозахватным органом (крюком, петлей, скобой).
Рис. 6. Схемы полиспастов
а — в четыре нитки; б — в шесть ниток; 1 — неподвижные блоки; 2 — подвижные блоки; 3 — отводной блок; 4 — канат
Полиспасты используются для выигрыша в силе (реже скорости). Выигрыш в силе тем больше, тем больше кратность полиспаста, равная числу рабочих ветвей каната, на которых подвешена подвижная обойма блоков полиспаста.
Рис. 7. Расчетные схемы полиспастов
1. Определить усилие 5Л в канате, идущем на лебедку, при подъеме груза весом Q = 20 т полиспастом, выполненным по схеме I. Блоки (ролики) полиспаста установлены на подшипниках качения (/j = 1,02), отводные ролики — на бронзовых втулках ( = 1,04).
2. Определить усилие 5Л в канате, идущем на лебедку, при подъеме груза весом 20 т полиспастом, выполненным по схеме II. Блоки (ролики) приняты на бронзовых втулках ( = 1,04).
3. Определить, какой груз Q можно поднять лебедкой с тяговым усилием 5Л = 1,5 тс и полиспастом, выполненным по схеме III. Блоки (ролики) приняты на бронзовых втулках.
Рекламные предложения:
Читать далее: Барабаны и канатоунладчики
Категория: —
Строительные машины и их эксплуатация
Главная → Справочник → Статьи → Форум
Полиспаст. Виды и устройство. Применение и особенности
Полиспаст – механическое устройство, состоящее из подвижных и неподвижных блоков с роликами. Предназначено для перемещения грузов, с использованием цепной или канатной передачи, главная особенность которого выигрыш в силе. Система позволяет с ее помощью выполнять подъем тяжестей, прикладывая для этого меньшее усилие.
Элементы полиспаста
В состав простейшего полиспаста входят:
Неподвижные блоки в системе представляют собой ролик на оси в корпусе, закрепленный в одном положении. При пропуске через него веревки или троса происходит только оборачивание ролика в момент прикладывания тягового усилия. За счет его применения выполняется изменение направления тяги. То есть, если нужно поднять привязанный груз вверх, то пропущенная через неподвижный блок веревка тянется вниз. Нагрузка при этом остается той же.
Подвижные блоки в полиспасте имеют аналогичную конструкцию, что и неподвижные. Единственное их отличие заключается в методе крепления. Груз цепляется непосредственно к подвижному блоку. Если пропустить через последний веревку, и потянуть за нее, то для поднятия прикрепленной тяжести потребуется приложить меньшее усилие в 2 раза, чем ее фактическая масса.
Как устроен полиспаст
Данное устройство является системой из подвижных и неподвижных блоков. Благодаря этому оно корректирует направления тягового усилия на передающую веревку или трос, при этом уменьшает его в определенное количество раз.
Самое простое устройство состоит из одного подвижного и одного неподвижного блока. Для выполнения поднятия груза с его помощью край веревки привязывается к якорю вверху. Затем она пропускается через подвижный блок, к обойме которого крепится предмет для перемещения. Дальше веревка заводится в неподвижный ролик, подвешенный вверху возле якоря. В таком случае если ее тянуть вниз, то груз будет подниматься вверх. Причем для этого нужно будет приложить усилие в 2 раза меньшее.
Если же усложнить систему, и увеличить количество блоков, то ее эффективность повысится. Так, у полиспаста с двумя подвижными и двумя неподвижными роликами выигрыш в силе составит уже в 4 раза. То есть, чтобы поднять определенный вес, нужно будет приложить только четверть усилия.
Представленные примеры имеют эффективность в выигрыше в силе 2 или 4 раза только в теории. На практике же этот показатель немного меньше, так как на продуктивность системы влияют и другие факторы. В целом, теоретически можно использовать полиспасты с огромным количеством блоков, и выигрывать в силе хоть в 100 или 1000 раз, но обычно это нецелесообразно, сложно и дорого.
Главный недостаток полиспаста
Как известно, к каждому воздействию имеется противодействие. Выигрыш в силе на полиспасте имеет и существенный недостаток – проигрыш в расстоянии. То есть, чтобы снизить усилие при подъеме груза в 2 раза используется обычная простейшая схема. Если вертикально перемещается 100 кг, то потянуть за веревку придется с усилием 50 кг. При этом для поднятия груза на 1 м в высоту, придется выбрать 2 м веревки. Когда же используется устройство с пятью подвижными блоками, то придется вытянуть вместо 1 м уже 10 м.
Выигрыш в силе равен проигрышу в расстоянии. Из-за этого и следует, что слишком сложных полиспастов с большим количеством блоков просто не делают. Для них необходимо использовать очень длинные веревки, троса или цепи. Это делает конструкцию дорогой и громоздкой. В реальной жизни обычно применяют полиспаст с выигрышем в силе максимум 8 раз, то есть на 4 подвижных блока.
Почему на практике выигрыш в силе меньше расчетного значения
Применение правила, что один подвижный ролик дает выигрыш в силе в 2 раза на практике не работает. Это значение получается немного меньшим, а иногда и существенно.
Причина этого в прочих условиях:
- Материале троса.
- Типе подшипников.
- Диаметре каната.
- Углу между канатом и средней плоскостью ролика.
Все перечисленные факторы влияют на уровень трения. Ролик блока при оборачивании требует прикладывания дополнительного усилия. Кроме этого значение имеет масса самих блоков и троса. Поднимать нужно не только сам груз, но и элементы системы. Все этого немного, но влияет на конечный выигрыш в силе. Так, на практике чтобы сдвинуть с места массу 100 кг устройством с кратностью 4 раза, приложить придется не 25 кг, а приблизительно 27-31 кг. Если ролики оборачиваются не на подшипниках, а втулках, кроме этого их оси не смазаны, то этот показатель возрастет еще больше.
Трение – это враг полиспаста. Чем оно ниже, тем эффективней система. Если применяются миниатюрные ролики, то выигрыш в силе меньший. Самое высокое КПД устройства на больших блоках.
Полиспаст на карабинах
Область использования полиспаста обширна. Его схема применяется для поднятия грузов в разных областях. Особенно часто ее используют альпинисты. При ограниченности снаряжения в походе часто выполняется сборка полиспаста без блоков с оборачиваемыми роликами. Вместо них применяются обычные карабины.
Это возможно только в сочетании со шнуром, так как благодаря его наружной оплетки, тот имеет невысокий коэффициент трения. Такая конструкция на карабинах работает, но существенно менее эффективно. Ее практическое применение целесообразно только при установке вместо роликов карабинов в количестве до 4 шт. Если больше, то для преодоления трения на них требуется приложить усилие, которое окажется больше, чем реальная масса перемещаемого груза. В идеале использовать такую систему на 2-3 карабина. Если же их будет существенно больше 4-х, то в определенный момент для поддержания груза на весу будет достаточно просто массы самого шнура, удерживаемого трением.
Виды
Полиспаст может иметь конструкцию различной сложности. В целом такие системы можно разделять на виды по ряду критериев:
- Назначению.
- Количеству блоков.
- Сложности схемы.
По назначению полиспасты разделяют на силовые и скоростные схемы. В первых ставится акцент именно на большой выигрыш в силе. В таком случае для выполнения перемещения груза нужно делать большую выборку веревки или троса. При этом сама тяжесть будет двигаться медленно. Скоростные схемы дают выигрыш в силе 2-4 раза, при этом действуют они сравнительно быстро. Они предназначены для работы с небольшими тяжестями, когда нужно просто слегка уменьшить уровень нагрузки.
Скорость срабатывания полиспаста зависит от используемого в нем типа привода. Если конец веревки тянет человек вручную, то и продуктивность схемы невысокая. Когда же она наматывается на быстро оборачиваемый вал лебедки, то фактическая скорость перемещения груза даже на силовой схеме будет высокой, хотя сравнительно и уменьшенной относительно самой выборки.
Полиспаст может состоять из разного числа блоков. Чем их количество выше, тем естественно больший вес можно поднять, приложив фиксированное усилие. На практике в отдельных случаях можно встретить устройства, схема которых предусматривает десятки роликов в подвижных и неподвижных узлах.
Также полиспасты разделяют на простые и сложные. В первых используется одна веревка, канат или цепь. В сложных системах объединяется несколько полиспастов с отдельными тросами. Это позволяет добиваться в силе большого выигрыша при использовании меньшего количества роликов. К примеру, если соединить вместе полиспасты на 1 и 2 блока, то конечная кратность связки получится 6 раз. При одном канате для такой эффективности нужно будет применять 6 роликов.
Область использования
Полиспаст применяется в разных отраслях для облегчения поднятия тяжестей, а также их перемещения по вертикальным и наклонным поверхностям.
Устройство используют для:
- Подъема альпинистов и их снаряжения по отвесным скалам.
- Погрузочных работ.
- Подъема стройматериалов.
- Извлечения автомобилей из снежных заносов, грязи.
- Выполнения спасательных операций.
- Натяжки кабеля на ЛЭП и т.д.
Схема полиспаста является элементом механизма подъемного крана, лифта, лебедки и десятков других машин. Ее использование позволяет отказаться от установки мощного привода. Так, к примеру, полиспаст позволяет лебедке со слабым двигателем, питаемым от бортовой сети 12В, вытягивать тяжелый многотонный автомобиль из грязи.
Виды полиспастов в продаже
Можно встретить соединенные блоки с роликами для сборки полиспаста. В них применяется одна ось, что обеспечивает упрощенный монтаж к якорю или к грузу. Такие элементы могут быть как небольшими, предназначенными для использования альпинистами или ручного перемещения стройматериалов на площадке, так и очень массивными. Последние применяют на карьерной и шахтной технике, грузовых лифтах.
Отдельного внимания заслуживают уже собранные системы с готовой распасовкой шнура. Они обычно рассчитаны на применение при эвакуации. Подобные устройства одним блоком цепляются к якорю, а вторым к грузу. Распасованный между роликами шнур необходимо вытягивать сбоку. В результате произойдет сужения между элементами. За счет того, что трос по сути складывается многократно, то в общем подобные системы выдерживают большие нагрузки. Их часто применяют, чтобы вытащить машину из снега или грязи. Если длины такого устройства недостаточно, то его можно подцепить цепью или стропой. Они послужат для передачи тягового усилия.
Похожие темы:
Схема системы с двумя шкивами
Система подвижных шкивов / класса 2. Система передачи энергии с натянутым ремнем, соединяющим два шкива. вы не получаете большого механического преимущества от вашей системы шкивов, хотя, имея аналогичную настройку, я знаю, почему вы вставили так много! Следовательно, из-за приложения усилия груз поднимается или смещается, когда шкив катится по длине каната. развернуть все на странице. Блок ременной передачи представляет собой пару шкивов, соединенных гибким идеальным, плоским или V-образным ремнем.Пример 2: Механическая система • Нарисуйте диаграмму свободного тела, показывающую все силы и их направления • Напишите уравнение движения и выведите передаточную функцию отклика x на вход u chp3 15. Большинство систем шкивов основаны на трении, что означает, что если одна сторона ремня и системы шкивов, ремень может соскользнуть по шкиву, если это необходимо. 2-3. Цель: собрать систему шкивов, чтобы получить механическое преимущество. Рисунок 2-8.-Некоторые другие снасти. Принцип работы шкива заключается в следующем: когда один конец троса тянется вниз, нагрузка на другом конце троса тянется вверх.На схеме слева показан фиксированный шкив. Слово тело используется для описания любого объекта. Сначала один конец каната прикрепляется непосредственно к грузу, затем он проходит вокруг закрепленного шкива (шкив B) и возвращается обратно к грузу, где он проходит через шкив A, который был прикреплен к грузу. Для более сложной системы с более чем одним шкивом могут быть достигнуты большие механические преимущества. Это простое механическое устройство для подъема и опускания троса. Длина ремня 56 ~ 7/8 дюймов. Идеальный ремень не скользит относительно поверхностей шкива.Глава 5 Обзор викторины. Это просто. Вы можете расположить блоки несколькими способами, в зависимости от правила, которое поможет вам приблизительно определить механику выполняемой работы и механическое преимущество большинства снастей, которые вы видите на флоте. ropebook 31 июля 2019 г. Это дает нам механическое преимущество в четыре раза. Это указывает на страницу, которая является отрицательным направлением. Схема свободного тела системы шкивов: Следующий анализ был проведен для работы в установившемся режиме (без ускорения). Система шкивов 4: 1 — канатная книга.Глава 5 Обзор викторины. Доступность: Доступность: В наличии Количество: + -. Вы сможете найти его на веб-сайте Daycoproducts.com в разделе «Автомобильные продукты». Пока один конец груза прикреплен к какому-либо неподвижному объекту, к другому концу прилагается сила. Пример 2: Механическая система chp3 16. Предполагается, что шкив гладкий и легкий. Нарисуйте fbd стержня ac. Один блок установлен на стреле, а другой — на тележке или рельсе рядом с кабиной пилота. Нарисуйте помеченную схему блокирующей системы шкивов с двумя шкивами в каждом блоке.Системы блоков используются для нескольких вещей на парусных лодках и в других местах. Схема 2: Подвижный шкив, поднимающий груз W, поддерживается двумя частями троса с натяжением W / 2. Фиксированный шкив: когда шкив прикреплен к фиксированной опоре, это фиксированный шкив. Скорость ленты 1570,8 фут / мин. Блок — это крепление для одного или нескольких шкивов. На каждом конце струны есть частица. Это хороший способ хранения, мы используем аналогичную систему шкивов для одного из наших велосипедов. Как видно на рисунке 4 ниже, у нас четыре шкива.RPM Large 500. Система шкивов с усилием, прилагаемым сверху, очень сложна в использовании. Частица B имеет массу 8 кг, а частица C — 2 кг, как показано на диаграмме. Ремень заставляет колесо ведомого шкива также вращаться, наматывая трос. 🙂 0. jtpoutdoor. Размеры Ширина: Ширина этой системы может составлять от 2 футов до 18 футов. Это различные типы систем шкивов: Фиксированный: у фиксированного шкива есть ось, установленная в подшипниках, прикрепленных к опорной конструкции. Частицы выходят из состояния покоя при натянутой струне.Следовательно, направление силы меняется с вниз на вверх! Это также известно как система шкивов с блокировкой и захватом, которая использует механическое преимущество подъема груза с помощью только половины силы, необходимой для его подъема. Материалы: разные шкивы, неоново-желтая струна, накопленный физический опыт. Процедура: 1. Шкив 2. Нарисуйте помеченную схему этой системы шкивов. Рассчитайте: (а) механическое преимущество системы и (б) усилие, необходимое для подъема… Теперь вес распределяется между четырьмя канатами.Масса 200,0 грамма (m 1) и масса 50,0 грамма (m 2) соединены веревкой. Напряжение t2, действующее на потолок, и реакция на t2. Нет, спасибо, попробуй бесплатно. Шкив 1. Работал Пример 1. Струна натянута на шкив. Механическое преимущество будет равно 2. Веревка или веревка проходят по этим приподнятым краям, не отрываясь. Если вы видите что-то, что требует исправления, прокомментируйте. Здесь мы имеем механическое преимущество 3: 1. RPM Small 1000. Эта система шкивов обеспечивает механическое преимущество 4: 1.Вот физическое объяснение этого типа простой машины. ответил 21 февраля 2019 г. пользователем Akul (72,2 тыс. баллов), выбран 22 февраля 2019 г. Викаш Кумар. Таким образом, видно, что усилие перемещается вдвое дальше груза. Этот процесс решения проблем будет продемонстрирован на трех различных примерах задач. На схеме шкив имеет радиус 0,300 м и массу 5,00 кг. Хотя это может показаться плохим, на самом деле это полезно, поскольку предотвращает остановку двигателя системой из-за слишком большого крутящего момента.Пружина-масса-демпфер Схема свободного тела () () () () 2 2 ky t r t dt dy t b dt d y t M chp3 14. Произведение m.o.i. Размотайте правый трос для приседаний со шкива (6) и проведите трос под кожухом троса (с логотипом Bowflex® Xtreme®2), продевая его под и через шкив задней поперечины (7) и вверх через плавающий (8 ) Шкив. Решение для 2. Обычно это делается с помощью системы блоков. Система шкивов, представленная ниже, имеет нагрузку 300 Н и три шкива: Какой вес нужен, чтобы тянуть груз? i) Нарисуйте помеченную схему расположения и ясно покажите направления всех сил, действующих на нее.2. Пример задачи 1. 8 августа 2019 г. — Вы попали прямо в раздел «Системы шкивов»! Рис. Шкив — это простая машина, состоящая из колеса с двумя приподнятыми краями. Легкая нерастяжимая струна проходит по гладкому световому шкиву. Сложные системы MA — это нормально, но простая или составная система обычно является лучшим выбором, потому что их, как правило, легче настроить и требуется меньше перезапусков.
Марез Fifa 21 Рейтинг,
Hatari Anti Capitalist,
Алекс Невский On Leur A Fait Croire,
Модератор Это было не для тебя Тексты песен,
Гиперэкстензионная деформация Mcp,
Номер телефона Prime 7,
Зеленые пейзажи обои HD для мобильных устройств,
Elle Est Essentielle,
Грудь к животу,
Блок шкивов — обзор
Средства остановки машин
На каждом заводе должны быть предусмотрены подходящие ударные механизмы или другие эффективные механические устройства, которые должны использоваться для перемещения приводных ремней.Такое оборудование или приспособления должны быть сконструированы, размещены и обслуживаться таким образом, чтобы предотвратить проскальзывание ремня на быстрый шкив. Приводные ремни, когда они не используются, не должны опираться или скользить по валу в движении. На каждом заводе должны быть предусмотрены подходящие устройства для отключения электричества в аварийных ситуациях от работающего оборудования, которые должны поддерживаться в каждом рабочем помещении.
В современных машинах с инверторными приводами, которые управляются с помощью компьютерного программирования, вероятность несчастных случаев исключается.
Каждая текстильная машина должна быть оборудована индивидуальными механическими или электрическими средствами остановки таких машин. На машинах, приводимых в движение ремнями и валом, следует использовать переключатель с блокировкой или эквивалентное положительное устройство. При выполнении операций, при которых оператор может получить травму в случае перезапуска двигателей после сбоев питания, необходимо принять меры для предотвращения автоматического перезапуска машин при восстановлении питания.
Защита для ремонтников машины: Каждый раз, когда машина останавливается для ремонта и внутри работает человек, необходимо принять меры для предотвращения ее непреднамеренного запуска.Панели управления могут быть заперты или предохранители могут быть удалены и убраны.
Кнопочное управление: Кнопочное управление должно иметь кнопки остановки и запуска, расположенные на каждом конце машины, и дополнительные кнопки, расположенные с обеих сторон машины в случае длинных и широких машин, таких как калибровка, мерсеризация и т. Д. , дополнительные кнопки должны быть предусмотрены с обеих сторон машины в точках рядом с зазорами.
Рычажное управление: Когда машины управляются с помощью рычагов управления, эти рычаги должны быть соединены с горизонтальной перекладиной или педалью, расположенной на высоте не более 69 дюймов над полом, для управления работой из любой точки.Однако современные машины работают с прямым приводом, и концепция рычажного управления устарела. Однако на некоторых старых мельницах в отдаленных районах все еще могут быть элементы управления такого типа. В ряде текстильных институтов этот тип машин эксплуатируется с академической точки зрения.
Рукоятки: Ручки останова и запуска должны иметь надлежащую длину, чтобы предотвратить удары руки или пальцев рабочего о любую вращающуюся часть, ограждение зубчатой передачи или любую другую часть машины.
Вращающееся оборудование: На каждом заводе должны приниматься эффективные меры для обеспечения того, чтобы не превышалась безопасная рабочая окружная скорость каждого вращающегося сосуда, клетки, корзины, маховика, шкива или аналогичного устройства, приводимого в действие мощностью. Табличка с указанием максимальной безопасной рабочей окружной скорости каждого револьверного станка должна быть размещена в каждом помещении на заводе, на котором осуществляется процесс шлифования.
Отверстия для очистки: Отверстия для очистки, используемые для очистки материалов из машины, в основном в продувочном помещении, в пределах досягаемости вентилятора или взбивателя, должны быть надежно закреплены, и они не должны открываться, пока машина находится внутри. движение.Необходимо установить табличку с указанием опасности и недопустимость попадания рук во время работы машины.
Защитные приспособления для прижима: Подающие ролики, где бы они ни были, должны быть закрыты защитным кожухом, предназначенным для предотвращения доступа оператора к прижиму во время работы оборудования. Все зажимы не должны быть больше, чем указанные зазоры, указанные в таблице на следующей странице (см. Рисунок, чтобы лучше понять).
| Расстояние отверстия от точки зажима в дюймах A | Максимальная ширина отверстия в дюймах B |
|---|---|
| от 0 до 1.5 | 0,25 |
| от 1,5 до 2,5 | 0,375 |
| от 2,5 до 3,5 | 0,5 |
| от 3,5 до 5,5 | 0,625 |
| 5,5 до 6,5 | 0,75 |
| от 6,5 до 7,5 | 0,875 |
| от 7,5 до 8,5 | 1,25 |
Подающие ролики: Подающие ролики на всех механизмах открывания и захвата должны быть закрыты защитным кожухом, предназначенным для предотвращения доступа оператора к зажиму во время захвата. техника находится в эксплуатации.
Кожухи: В машине, имеющей наконечники для проводов, фиксаторы или гребни, они должны быть закрыты и снабжены ограждениями. Тип корпуса зависит от типа точек и скорости, с которой они работают. Например, цилиндр кардочесальной машины и лизунчик должны быть оборудованы ограждениями, а съемники должны быть закрыты. Это означает, что цилиндр и лизун не должны работать, если двери открыты. Doffer, который работает медленно, может работать. Точно так же гребнечесальные машины не должны работать, если двери открыты.
Защита пальцев: Защита должна быть размещена перед подающей стороной машины с использованием падающих штифтов, например жаберного ящика, и должна быть сконструирована таким образом, чтобы предотвращать попадание пальцев рабочего в штифты пересекающихся валков. .
Давление: Если на каком-либо заводе какая-либо часть оборудования или оборудования, используемого в производственном процессе, работает под давлением выше атмосферного, должны быть приняты эффективные меры, чтобы гарантировать, что безопасное рабочее давление такой части не превышено.Эти машины должны периодически проверяться компетентным органом и быть сертифицированы как пригодные для использования.
Подъемники и подъемники: На каждом заводе подъемники и подъемники должны быть хорошей механической конструкции, из прочных материалов и соответствующей прочности. Они должны содержаться в надлежащем состоянии и тщательно проверяться компетентным лицом не реже одного раза в шесть месяцев. Ведется реестр, содержащий предписанные сведения о каждой такой проверке. Каждый подъемник и подъемник должны быть в достаточной мере защищены ограждением, снабженным воротами, а подъемник или подъемник и каждое такое ограждение должны быть сконструированы таким образом, чтобы предотвратить попадание любого человека или предмета в ловушку между любой частью подъемника или подъемника и любым неподвижная конструкция или подвижная часть.Максимальная безопасная рабочая нагрузка должна быть четко обозначена на каждом подъемнике или подъемнике, и груз, превышающий эту нагрузку, не должен перевозиться на них. Клетка каждого подъемника или подъемника, используемого для перевозки людей, должна быть оборудована воротами с каждой стороны, с которых можно попасть на площадку. Каждые ворота должны быть оснащены блокировкой или другим эффективным устройством, чтобы гарантировать, что ворота не могут быть открыты, кроме случаев, когда клетка находится на площадке, и клетка не может быть перемещена, если ворота не закрыты. Если в подъемниках и подъемниках, используемых для перевозки людей, клетка поддерживается тросом или цепью, должно быть не менее двух тросов или цепей, отдельно связанных с клеткой и противовесом, и каждая веревка или цепь с ее креплениями должны быть способны выдерживать нагрузку. нести весь вес клетки вместе с ее максимальной нагрузкой.Должны быть предусмотрены и поддерживаются эффективные устройства, способные поддерживать клетку вместе с ее максимальной нагрузкой в случае обрыва троса, цепи или приспособлений. Должно быть обеспечено и поддержано эффективное автоматическое устройство, предотвращающее опрокидывание клетки.
Подъемные машины, цепи, канаты и подъемные механизмы: «Подъемная машина» означает любой кран, краб, лебедку, блок шкива, колесо джина и взлетно-посадочную полосу. «Подъемные приспособления» означают цепные стропы, канатные стропы, крюки, скобы и вертлюги.На каждом заводе должны быть приняты следующие меры безопасности в отношении каждой подъемной машины (кроме подъемника и подъемника), а также каждой цепи, каната и подъемного оборудования с целью подъема или опускания людей, товаров или материалов —
- a.
Все части, включая рабочий механизм каждой подъемной машины и каждой цепи, троса или подъемного устройства, должны быть хорошей конструкции, из прочного материала и надлежащей прочности, не иметь дефектов, должным образом обслуживаться и тщательно проверяться компетентным лицом, по крайней мере, один раз в год. каждые двенадцать месяцев.
- б.
Ни одна подъемная машина, ни одна цепь, трос или подъемное оборудование не должны быть нагружены сверх допустимой рабочей нагрузки, которая должна быть четко обозначена на ней.
- г.
В то время как любое лицо работает или работает на колесной колее мостового крана или рядом с ней в любом месте, где он может быть подвержен ударам крана, должны быть приняты эффективные меры для предотвращения приближения крана в течение двадцати футов того места. Подъемная машина или цепь, канат или подъемное приспособление должны быть тщательно проверены, чтобы сделать надежный вывод о ее безопасности.
Лицо, работающее с кранами, должно быть обеспечено шлемом и обеспечено его использование.
Полы, лестницы и средства доступа: На каждом заводе все этажи, ступени, лестницы и переходы должны иметь прочную конструкцию и содержаться в надлежащем состоянии, а там, где необходимо обеспечить безопасность, ступени, лестницы и переходы должны быть снабжены прочными поручнями. Насколько это практически возможно, должны быть обеспечены и поддерживаются безопасные средства доступа к каждому месту, где любое лицо должно в любое время работать.
Ямы, отстойники, отверстия в полу и т. Д., Которые могут быть источником опасности, должны быть либо надежно закрыты, либо надежно ограждены. Надежное ограждение ямы означает ее покрытие или ограждение таким образом, чтобы она перестала быть источником опасности.
Схема системы с двумя шкивами
Система шкивов 4: 1 — канатная книга. Здесь мы имеем механическое преимущество 3: 1. 2-3. 5 лет назад на Introduction. Глава 5 Обзор викторины. машины; icse; класс-10; Поделиться на Facebook Twitter Электронная почта 1 Ответ +1 голос. ii) Какие изменения можно внести в подвижный шкив этой системы, чтобы увеличить механическое преимущество системы? Механическое преимущество будет 2.Системы шкивов — ropebook. ответил 21 февраля 2019 г. пользователем Akul (72,2 тыс. баллов), выбран 22 февраля 2019 г. Викаш Кумар. Рис. Сначала один конец троса прикрепляется непосредственно к грузу, затем он проходит вокруг закрепленного шкива (шкив B) и возвращается обратно к грузу, где он проходит через шкив A, который был прикреплен к грузу. Большинство систем шкивов основаны на трении, что означает, что если одна сторона ремня и системы шкивов заедает, ремень может соскользнуть по шкиву, если это необходимо. Струна натянута на шкив.Нарисуйте помеченную схему блокирующей системы шкивов с двумя шкивами в каждом блоке. Это различные типы систем шкивов: Фиксированный: у фиксированного шкива есть ось, установленная в подшипниках, прикрепленных к опорной конструкции. 3-шкивная система с механическим преимуществом в два. Пример проблемы 1. 3: 1 против другого 3: 1 дает вам механическое преимущество 9: 1. вся система остается 2. Кратко оцените механическое преимущество. На схеме слева показан фиксированный шкив. Узнайте, почему закрылись.ropebook 31 июля 2019. На схеме радиус шкива 0,300 м, масса 5,00 кг. Следовательно, из-за приложения усилия груз поднимается или смещается, когда шкив катится по длине каната. Размеры Ширина: Ширина этой системы может составлять от 2 футов до 18 футов. Напряжение t2, действующее на потолок, и реакция на t2. Если вы видите что-то, что требует исправления, прокомментируйте. Глава 5 Обзор викторины. Рисунок 2-8.-Некоторые другие снасти. Ответить на голосование. Доступность: Доступность: В наличии Количество: + -.1867 ответов. Подвижная система шкивов класса 2. вы не получаете большого механического преимущества от вашей системы шкивов, хотя, имея аналогичную настройку, я знаю, почему вы вставили так много! Вопрос. Как видно на рисунке 4 ниже, у нас четыре шкива. Их связывает веревка. Сдвиньте правый шкив рамы для приседаний (6) в самое дальнее заднее отверстие, как показано на Рисунке 20. Пока один конец груза прикреплен к какому-либо неподвижному объекту, к другому концу прилагается сила. Система, которая не является ни простой, ни… фиксированными и подвижными шкивами.На этой схеме шкив, прикрепленный к грузу, фактически состоит из двух отдельных шкивов на одном валу, как показано справа. 1997-2005 Jeep Wrangler TJ с двигателем 2.5L или 4.0L 1987-2001 Jeep Cherokee XJ с двигателем 2.5L или 4.0L 1987-1992 Jeep Comanche MJ с двигателем 2.5L или 4.0L 1993-1998 Jeep Grand Cherokee ZJ w / Двигатель 4.0L 1999-2004 гг. Jeep Grand Cherokee WJ с двигателем 4.0L 1987-2002 гг. Jeep с двигателем AMC V8 5.0L или 5.9L. На каждом конце струны есть частица. Система шкивов состоит из двух шкивов, одного неподвижного, а другого подвижного.На схемах ниже показаны оба типа стоек на системе с 3 шкивами. Шкив — это простая машина, состоящая из колеса с двумя приподнятыми краями. При добавлении шкива к неподвижному блоку стрелы направление тянущего усилия меняется на противоположное, хотя механическое преимущество остается прежним, Диаграмма 3a. Частицы выходят из состояния покоя при натянутой струне. Используя блоки, можно использовать небольшое усилие для перемещения гика и паруса. Люди постоянно используют составные шкивы. На диаграмме 3 показаны три части каната, поддерживающие нагрузку W, что означает, что натяжение каната равно W / 3.Итак, m.o.i. Сложная система имеет шкив (ы), который движется в направлении, противоположном нагрузке. Размотайте правый трос для приседаний со шкива (6) и проведите трос под кожухом троса (с логотипом Bowflex® Xtreme®2), продевая его под и через шкив задней поперечины (7) и вверх через плавающий (8 ) Шкив. Они основаны на принципе работы-энергии. Шкив предполагается гладким и легким. Система шкивов имеет отношение скоростей 3 и КПД 8 0%. Фиксированный шкив: когда шкив прикреплен к фиксированной опоре, это фиксированный шкив.На схемах ниже показаны оба типа дополнительных опор в системе с двумя шкивами. Материалы: разные шкивы, неоново-желтая струна, накопленный физический опыт. Процедура: 1. Фиксированный шкив не … Вырезы в нижней балке сделаны таким образом, чтобы он не зацепился за канаты и не защемил их. Обороты большие 500. Длина ремня 56 ~ 7/8 «. Нарисуйте диаграммы свободного тела и примените закон Ньютона к ускоряющим системам. Теперь вес распределяется между четырьмя веревками. Решение для 2. 🙂 0. jtpoutdoor. Вы должны быть в состоянии найти это на Daycoproducts.com в разделе автомобильные товары. Чтобы удержать вес в воздухе, вы должны приложить только 25 фунтов силы, но чтобы поднять вес на 100 футов выше в воздухе, вы должны теперь намотать 400 футов веревки. Добавляя механическое преимущество 2: 1 к системе механического преимущества 3: 1, вы усиливаете или умножаете механическое преимущество и в итоге получаете 6: 1. Ремень заставляет колесо ведомого шкива также вращаться, наматывая трос. Это указывает на страницу, которая является отрицательным направлением. II Ширина / капли / швы.Формула для m.o.i. Если груз поднимается на 2 метра над колесом шкива — веревку с правой стороны необходимо укоротить на один метр, это также относится и к левой стороне. Масса 200,0 грамма (m 1) и масса 50,0 грамма (m 2) соединены веревкой. Здесь мы посмотрим, как они работают. На приведенной ниже диаграмме свободного тела показаны вес w и натяжение t1, действующие на блок. а угловая скорость будет равна крутящему моменту (силе вращения) на шкиве. 8 августа 2019 г. — Вы попали прямо в раздел «Системы шкивов»! Пружина-масса-демпфер Схема свободного тела () () () () 2 2 ky t r t dt dy t b dt d y t M chp3 14.Шкив 2. Нарисуйте основание стержня ac. Системы блоков используются для нескольких вещей на парусных лодках и в других местах. Система шкивов, представленная ниже, имеет нагрузку 300 Н и три шкива: Какой вес нужен, чтобы тянуть груз? Это пример снасти Luff. Этот процесс решения проблем будет продемонстрирован на трех различных примерах задач. Держите колеса вращающимися … Это дает нам четырехступенчатое механическое преимущество. Это просто. Вы можете расположить блоки несколькими способами, в зависимости от правила, которое поможет вам приблизительно определить механику выполняемой работы и механическое преимущество большинства снастей, которые вы видите на флоте.Блок ременной передачи представляет собой пару шкивов, соединенных гибким идеальным, плоским или V-образным ремнем. Это хороший способ хранения, мы используем аналогичную систему шкивов для одного из наших велосипедов. Пример 2: Механическая система • Нарисуйте диаграмму свободного тела, показывающую все силы и их направления • Напишите уравнение движения и выведите передаточную функцию реакции x на вход u chp3 15. Это простое механическое устройство для подъема и опускания троса. Нарисуйте помеченную диаграмму этой системы шкивов. Рассчитайте: (а) механическое преимущество системы и (б) усилие, необходимое для поднятия… развернуть все на странице.Составные системы шкивов создаются, когда простая система шкивов натягивает другую простую систему шкивов. В этом типе ось шкива может свободно перемещаться в пространстве. С добавлением узла трения (красный) и карабина теперь у нас есть 2: 1 натяжение на 3: 1. Слово тело используется для описания любого объекта. Трос… Схема калькулятора оборотов шкива и длины ремня. Для более сложной системы с более чем одним шкивом могут быть достигнуты большие механические преимущества. Система шкивов 4: 1 — канатная книга.2, где m — масса, r — радиус. Когда двигатель включен, он вращает ведущее колесо шкива. Шкив 1 шкив 2 нарисуйте схему свободного тела на шкиве 2. Масса слева составляет 16,0 кг, а масса справа — 12,0 кг. Зазор шкива 5 дюймов. Шкив 1. Система шкивов 3: 1. Это проверка для технологии спасения каната NPQ. Рабочий пример 1. Нет, спасибо, попробуйте бесплатно. Скорость ленты 1570,8 футов / мин. Ленточные пилы являются отличным примером этого. Цель : Соберите систему шкивов, чтобы получить механическое преимущество На схеме ниже показана простая система, состоящая из двух колес шкива и ремня.Укажите направления нагрузки, усилия и натяжения струны. Сложные шкивные системы. Вот физическое объяснение этого типа простой машины. Лучший ответ. Соберите следующую систему шкивов 1 2. Один блок установлен на стреле, а другой на ходовой части или рельсе рядом с кабиной пилота. Касательно: Diagram 2007 jetta serpentine belt, их 2. Пример 2: Механическая система chp3 16. Веревка или веревка проходят по этим приподнятым краям, не отрываясь. Библиотека: Simscape / Трансмиссия / Описание муфт и приводов.Ого, вы попали прямо в раздел «Системы шкивов»! Таким образом, видно, что усилие перемещается вдвое дальше груза. Обычно это делается с помощью системы блоков. Система передачи энергии с натянутым ремнем, соединяющим два шкива. Блок — это крепление для одного или нескольких шкивов. Шкивную систему с усилием, прикладываемым сверху, использовать очень сложно. Легкая нерастяжимая струна проходит по гладкому световому шкиву. Принцип работы шкива заключается в следующем: когда один конец троса тянется вниз, нагрузка на другом конце троса тянется вверх.2. Следовательно, направление силы меняется с вниз на вверх! Пользователь должен приложить силу 25 кг, чтобы поднять этот 100 кг груз на каждые…. Схема свободного тела системы шкивов: Следующий анализ был проведен для работы в установившемся режиме (без ускорения). Соотношение 1: 2. Затем к каждой диаграмме можно применить законы Ньютона, чтобы получить систему из двух уравнений для решения двух неизвестных. Хотя это может показаться плохим, на самом деле это полезно, поскольку предотвращает остановку двигателя системой из-за слишком большого крутящего момента.Сложные системы MA — это нормально, но простая или составная система обычно является лучшим выбором, потому что их, как правило, легче настроить и требуется меньше перезапусков. RPM Small 1000. Сила, действующая на ведущий шкив, равна разнице двух приложенных натяжений с каждой стороны. Такое расположение вдвое снижает силу и снова удваивает расстояние. Схема 2: Подвижный шкив, поднимающий груз W, поддерживается двумя частями троса с натяжением W / 2. Эта система шкивов обеспечивает механическое преимущество 4: 1.
Les Deux Freres Quesque Tu Dirais,
Медуллярный рак толстой кишки,
Boy Smells Slow Burn Candle Review,
Белла синоним итальянский,
Mlb Dfs Live Scoring,
Cobra Cxt 645,
2.4: Решение проблем — Physics LibreTexts
Далее мы сосредоточимся на элементах решения проблем. У нас есть все необходимые инструменты, так что это не будет связано с какой-либо новой физикой, но идея состоит в том, чтобы познакомить вас с некоторыми общими темами, которые возникают в задачах физики и механики.
Шкивы
Одно из любимых устройств для физических задач — шкив. Как было сказано в описании силы натяжения, для начала мы используем простейшую модель, что означает, что мы будем предполагать, что шкивы безмассовые и без трения.Шкивы становятся особенно интересными в ситуациях, подобных следующему примеру, когда хотя бы один из шкивов может двигаться. Два блока остаются неподвижными в системе тросов и шкивов, показанной на схеме. Учитывая эту информацию, можете ли вы сделать вывод, как сравниваются две массы?
Рисунок 2.4.1 — Блоки, подвешенные на нескольких шкивах
К настоящему времени мы знаем, что когда дело доходит до анализа сил, присутствующих в системе, нет лучшего инструмента, чем FBD.Начнем там:
Рисунок 2.4.2 — FBD блока и шкива
[Мы взяли на себя смелость определять системы координат в наших FBD — вверх является \ (+ y \) — направлением для обоих — что нам понадобится в ближайшее время.]
Может возникнуть вопрос, почему для шкива нарисовано два вектора силы натяжения. Самый простой ответ — подумать о том, что вы почувствуете, если перережете веревку с обеих сторон шкива и держите по одному концу каждой рукой. Очевидно, вы почувствуете, как оба конца веревки тянут вниз.Следовательно, согласно третьему закону Ньютона, оба конца веревки натягиваются на шкиве. Для шкива, не имеющего массы и трения, эти две силы натяжения также должны быть равны, что объясняет, почему они обозначены одинаково. Обратите внимание, что вектор натяжения на блоке также помечен тем же именем переменной. Это связано с тем, что это та же веревка и , и наше предположение о безмассовых шкивах без трения гарантирует, что везде, где мы измеряем натяжение одного куска веревки, оно будет одинаковым.
Предупреждение
Если бы мы изобразили вектор силы натяжения, тянущий вверх на правом шкиве, мы не смогли бы обозначить его так же. Не все векторы натяжения в одной физической системе равны, только величины всех векторов натяжения, полученные от одной и той же веревки.
Еще один любопытный аспект этого FBD — это весовая этикетка левого шкива. Технически эта сила действует на блок, и блок тянет за шкив. В этом случае сила натяжения шкива блоком равна весу блока, а сам шкив не имеет собственного веса, так что мы вправе пойти по этому пути.Другой способ обосновать это — рассматривать блок + шкив как единую систему, а сила тяжести, действующая на систему, является показанным вектором силы.
Следующим шагом в нашем анализе является суммирование сил для каждого объекта и применение второго закона Ньютона, который в данном случае предполагает нулевое ускорение. При вычислении суммы сил мы должны позаботиться о том, чтобы правильно использовать нашу систему координат:
\ [\ left. \ begin {array} {l} 0 = a_1 = \ dfrac {F_ {net \; 1}} {m_1} = \ dfrac {2T — m_1 g} {m_1} \; \; \; \Правая стрелка \;\;\; T = \ dfrac {m_1 g} {2} \\ 0 = a_2 = \ dfrac {F_ {net \; 2}} {m_2} = \ dfrac {T — m_2 g} {m_2} \; \; \; \; \Правая стрелка \;\;\; T = m_2 g \\ \ end {array} \ right \} \; \; \; \Правая стрелка \;\;\; м_1 = 2 м_2 \]
Обратите внимание, что легкий \ (m_2 \) выдерживает более тяжелый, потому что размещение шкива позволяет нам использовать натяжение одной и той же веревки дважды на более тяжелую массу.Этот трюк можно повторять сколько угодно раз (на шкиве может быть несколько дорожек), и это позволяет нам поднимать очень тяжелые веса с очень небольшой силой. Данное изобретение называется блоком и снастью . Они используются для плавания на парусных судах (тяжелые паруса и гика можно затянуть сильнее), подъема блоков двигателей и многих других применений.
Ограничения
Затем мы рассмотрим сложную концепцию, известную как ограничение s. Ограничение — это условие, которое существует для физической системы, которое ограничивает ее поведение.Что делает концепцию «сложной», так это то, что они, в конечном счете, играют математическую роль в решении проблемы, но эту роль часто трудно выделить из формулировки проблемы. Проще говоря, ограничения связывают переменные в задаче друг с другом, обеспечивая дополнительные уравнения (помимо второго закона Ньютона), с которыми можно работать. Мы уже видели пример ограничения. Это соотношение между силой трения и нормальной силой. Для кинетического трения это дает уравнение, которое связывает эти две силы, в то время как для статического трения он устанавливает верхний предел величины трения для данной нормальной силы.
Один из наиболее распространенных примеров ограничения относится к канатам, движущимся через шкивы. Это ограничение связывает движение одного объекта с движением другого, когда они соединены системой шкивов. Вернемся к системе, показанной на рисунке 2.4.1, и зададим следующий вопрос: если блок \ (m_2 \) падает на расстояние \ (\ Delta y \), что происходит с блоком \ (m_1 \)?
Прежде всего, должно быть ясно, что \ (m_1 \) возрастает по мере того, как \ (m_2 \) падает, поэтому вопрос только в том, как далеко? Поначалу это может быть не очевидно, но подумайте об этом так: когда шкив, удерживающий \ (m_1 \), перемещается на 1 единицу, оба сегмента струны, идущие вверх от шкива, становятся короче на 1 единицу.Эти две единицы строки не просто исчезают, и фактически они принимаются свободным концом строки, который прикреплен к \ (m_2 \). Это означает, что когда \ (m_2 \) падает на расстояние \ (\ Delta y \), \ (m_1 \) должен подниматься только на половину этого расстояния.
Что это говорит о сравнении скоростей и ускорений двух блоков? Что ж, они должны двигаться одновременно, поэтому каждая единица длины, отброшенная на \ (m_2 \), соответствует увеличению \ (m_1 \) на половину, а это означает, что \ (m_1 \) всегда перемещается на половину скорость и разгоняется вдвое меньше, чем \ (m_2 \).Если эта система не сбалансирована (как это было выше), то применение второго закона Ньютона к обоим блокам включает в себя два ускорения, но они ограничены, связаны друг с другом в два раза, что дает нам дополнительное ограничение уравнение :
\ [2 \ left | a_1 \ right | = \ left | a_2 \ справа | \]
Что с абсолютными значениями, спросите вы? Что ж, эти переменные могут иметь положительные или отрицательные значения, и мы должны быть осторожны, когда дело касается знаков.в частности, мы должны посмотреть, как наше ограничение связано с нашим выбором систем координат для двух блоков. На рисунке 2.4.2 мы выбрали «вверх» в качестве положительного направления для обоих блоков. Поэтому нам нужно спросить себя: «Если один блок испытывает положительное смещение, каков знак смещения другого блока?» В этом случае ясно, что смещения двух блоков имеют противоположные знаки. Следовательно, уравнение ограничения для ускорений блока:
\ [2a_1 = -a_2 \]
Обратите внимание, что совершенно нормально установить разные системы координат для двух блоков — каждый FBD имеет право на свою собственную индивидуальную систему координат.То, как системы координат соотносятся друг с другом, влияет на уравнение связи. Так, например, если бы мы вместо этого выбрали нисходящее направление + \ (y \) — для блока № 2 (но оставили вверх как положительное значение для другого блока), тогда не было бы необходимости в знаке минус в ограничении уравнение — положительные смещения одного блока соответствуют положительным смещениям другого блока. Мы видим, что поэтому не существует «правильного» выбора системы координат, но мы должны позаботиться о том, чтобы когда придет время объединить уравнения из двух FBD, чтобы уравнения ограничений правильно связывали переменные.В следующем примере мы увидим еще более яркий пример выбора системы координат.
Пример \ (\ PageIndex {1} \)
Высота двух блоков на диаграмме ниже отличается на 36 см. Когда они выходят из состояния покоя, верхний блок падает, а нижний блок поднимается. Один из блоков имеет массу, в три раза превышающую массу другого блока, шкивы безмассовые и без трения, а струна не растягивается.
- Какой блок тяжелее? Объяснять.
- Найдите расстояние, на которое поднимается нижний блок, когда два блока выровнены.
- Найдите время, необходимое для выравнивания двух блоков.
- Решение
а. Натяжение струны, продетой через шкивы, везде одинаково, поэтому на нижний блок действует в три раза больше силы натяжения, чем на верхний. Если бы нижний блок был в три раза тяжелее верхнего, тогда система была бы сбалансирована, и ни одна масса не могла бы ускоряться.[Вы должны попробовать выполнить математику части (c) с массами другим способом и продемонстрировать себе, что это ускорение должно быть равно нулю.] Учитывая, что система ускоряется, это должен быть более высокий блок с большим масса.
г. Когда верхний блок тянет струну вниз с одной стороны большого шкива, то же количество струны, которое набирается с левой стороны шкива, теряется с правой стороны. Струна с правой стороны большого шкива разделена между тремя сегментами, удерживающими другой блок.Следовательно, нижний блок перемещается на одну треть вверх по мере того, как верхний блок перемещается вниз. Если нижний блок поднимается на расстояние \ (y \), то верхний блок опускается на расстояние \ (3y \), и, поскольку они достигают той же высоты, сумма этих изменений составляет 36 см, что означает, что нижний блок поднимается на расстояние длины \ (y = 9 \) см.
г. Чтобы узнать время, необходимое им для выравнивания, нам нужно использовать их ускорения. Мы уже знаем их относительные ускорения: нижний блок ускоряется на одну треть скорости верхнего блока.Поэтому мы будем называть ускорение верхнего блока «\ (3a \)», делая ускорение нижнего блока равным \ (a \). Но нам нужны законы Ньютона, чтобы пойти дальше. FBD двух задействованных систем выглядит так:
Большая масса в три раза больше меньшей массы, поэтому мы будем называть \ (m_2 \) просто «\ (m \)», что делает \ (m_1 \) равным \ (3m \). Включение всего во второй закон Ньютона для обоих FBD дает следующие уравнения:
\ [\ left.\ begin {array} {l} a_1 = \ dfrac {F_ {net \; 1}} {m_1} \; \; \; \Правая стрелка \;\;\; 3a = \ dfrac {-T + 3mg} {3m} \\ a_2 = \ dfrac {F_ {net \; 2}} {m_2} \; \; \; \Правая стрелка \;\;\; a = \ dfrac {3T — mg} {m} \\ \ end {array} \ right \} \; \; \; \Правая стрелка \;\;\; a = \ frac {2} {7} g \ nonumber \]
С учетом ускорения нижнего блока, расстояния, которое он проходит, и того факта, что он начинается в состоянии покоя, мы можем вычислить время, необходимое для совершения поездки:
\ [y = v_o t + \ frac {1} {2} at ^ 2 \; \; \; \Правая стрелка \;\;\; t = \ sqrt {\ dfrac {7y} {g}} = \ в коробке {0.25 с} \ nonumber \]
Наклонные плоскости
Шкивы
(и, в частности, блокиратор и захват) — это пример того, что часто называют простой машиной . Это потому, что мы можем использовать такое устройство для подъема тяжелого веса с силой, меньшей, чем сам вес. Другой пример простой машины — наклонная плоскость . Эти устройства также позволяют выполнять задачу по подъему тяжелого объекта на более высокое положение с использованием меньшего усилия, чем было бы необходимо при прямом подъеме.Основная особенность задач, связанных с наклонными плоскостями, — это система координат, используемая для объекта на наклонной плоскости. Давайте посмотрим на пример. Как обычно, мы начинаем с самого простого примера и усложняем его по ходу дела — блок массы \ (M \) на плоскости без трения, наклоненной под углом \ (\ theta \):
Рисунок 2.4.3 — Блок на наклонной плоскости
Начнем наш анализ, как всегда, с диаграммы свободного тела.Ни одна FBD не является полной без выбора системы координат, поэтому мы должны выбрать ее здесь. Если мы выберем нашу систему координат горизонтальной и вертикальной, как мы обычно делаем, тогда, когда блок скользит по плоскости, его ускорение будет иметь как компоненты \ (x \), так и \ (y \). Это, конечно, нормально, но работать с этим может быть немного неудобно. В горизонтальном и вертикальном направлениях нет ничего священного, так почему бы не выбрать систему координат, параллельную и перпендикулярной плоскости?
Рисунок 2.4.4 — Система координат наклонной плоскости
На средней диаграмме на рисунке 2.4.4 показана сумма нормальных и гравитационных сил между хвостом и головой, приводящая к результирующей силе, параллельной плоскости и вниз по плоскости, как и должно быть, поскольку мы знаем, в каком направлении будет двигаться блок. ускоряться. На правой диаграмме показана сила тяжести, разбитая на ее компоненты \ (x \) и \ (y \) в выбранной системе координат (вы должны сами проверить геометрию, которая приводит к заключению, что угол на этой диаграмме совпадает с углом наклон составляет горизонталь).Обратите внимание: поскольку блок не ускоряется перпендикулярно плоскости, мы можем сделать вывод, что \ (N = Mg \ cos {\ theta} \). Также ясно, что чистая сила — это \ (x \) — составляющая силы тяжести, в результате чего ускорение вниз по плоскости равно \ (a = g \ sin {\ theta} \).
Предположим, мы хотим поднять этот блок на новую высоту. Чтобы заставить его двигаться вверх по плоскости, нам нужно приложить силу, которая превышает указанную выше результирующую силу, которая меньше силы, которую нам пришлось бы приложить, чтобы поднять его прямо вверх.Как и в случае с блоком и снастью, эта «простая машина» помогает нам выполнять работу с меньшими усилиями, чем требуется, если она выполняется более непосредственно. В случае блока и снасти, чтобы поднять груз на некоторое расстояние, другой конец веревки нужно было протянуть на большее расстояние. В этом случае мы видим аналогичную вещь — расстояние, на которое мы должны толкнуть блок, является гипотенузой треугольника, чтобы поднять его на высоту вертикального катета треугольника. Это обычная тема для простых машин — требуется меньшее усилие, но оно должно применяться на большем расстоянии.В следующей главе мы увидим, почему это так.
Мы можем значительно усложнить этот простой пример. Самая естественная регулировка — включить трение. Из-за природы двух типов трения добавление статического трения (которое входит в неравенство) может быть особенно проблематичным. Чтобы понять, почему, давайте рассмотрим следующую проблему:
Система, изображенная на рисунке 2.4.5, показывает два блока, которые остаются в состоянии покоя, которые прикреплены безмассовой струной к безмассовому шкиву без трения.Плоскость наклонена под углом \ (тета \) вверх от горизонтали, а ее поверхность шероховатая (т. Е. Не лишенная трения). Приведены масса подвесного блока, угол наклона и коэффициент статического трения. По этим величинам определите минимально возможное значение массы блока на плоскости.
Рисунок 2.4.5 — Механическая система
Начиная (как всегда) с FBD (включая систему координат) для каждого блока, мы имеем:
Рисунок 2.4.6 — Схемы блоков со свободным телом
Давайте прокомментируем направление силы статического трения. Напомним, что сила статического трения просто реагирует на «попытку» движения объекта по поверхности. В этом случае, если блок «пытался» скользить по плоскости, то сила статического трения должна быть вверх по плоскости. Здесь он направлен вниз по плоскости, что означает, что другие силы должны быть такими, чтобы ускорять его вверх по плоскости… Как мы узнаем, что это так? Ответ заключается в постановке вопроса: мы ищем минимальную массу блока на плоскости. Представьте себе блок, масса которого уравновешивает систему. если к блоку добавить или вычесть небольшую массу, система может оставаться в покое, так как статическое трение удерживает баланс. Если мы добавим этому блоку слишком много массы, статическое трение достигнет своего предела и блок начнет скользить вниз, а если мы уберем слишком много массы, он будет скользить вверх по плоскости.Статическое трение будет противодействовать намеченному движению, поэтому для минимальной массы сила статического трения должна быть направлена вниз по плоскости.
Предупреждение
Хотя мы можем определить направление статического трения для этой задачи, во многих задачах это невозможно. Если вы знаете, что сила статического трения присутствует (или может быть), просто втяните ее в любом направлении. Когда проблема решена, если вы решите значение этой силы, она будет положительной, если вы выбрали правильное направление, и отрицательной, если вы этого не сделали.FBD — это всего лишь инструмент, и в конечном итоге вы получите ответ, поэтому не тратьте энергию на то, чтобы получить правильное направление на диаграмме.
Разделение векторов на компоненты в выбранных нами системах координат и применение второго закона Ньютона (для нулевого ускорения) дает:
\ [\ begin {array} {l} block \; на \; плоскости: \; \; \ begin {array} {l} x — направление \; силы: \; \; 0 = a_x = \ dfrac {f — T + Mg \ sin {\ theta}} {M} \\ y — направление \; силы: \; \; 0 = {a_y} = \ dfrac {N — Mg \ cos {\ theta}} {M} \ end {array} \\ висит \; блок: \; \; \; y — направление \; силы: \; \; 0 = {a_y} = \ dfrac {T — mg} {m} \ end {array} \]
Затем примените ограничение, которое связывает максимальную силу трения покоя (которая возникает, когда минимальная масса находится на плоскости) и нормальную силу:
\ [f \ le \ mu_S N \; \; \; \Правая стрелка \;\;\; (максимум \; f \; для \; минимум \; M) \; \; \; \Правая стрелка \;\;\; f = \ mu_S N \]
Остальное — это алгебра с четырьмя системами уравнений, результат которых:
\ [M_ {min} = \ frac {m} {\ mu _S \ cos \ theta + \ sin \ theta} \]
Теперь мы должны проверить, имеет ли этот ответ смысл.o \) случае (горизонтальная поверхность, где нормальная сила равна весу блока на поверхности) потребует, чтобы сила трения равнялась весу подвесного блока. То есть мы должны иметь \ (mg = f = \ mu_S N = \ mu_S Mg \; \; \ Rightarrow \; \; m = \ mu_S M \), что мы получаем, когда подставляем ноль для \ ( \ тета \).
Эта проблема могла бы так же легко запросить максимальное возможное значение для \ (M \). Читателю предлагается попробовать это в качестве упражнения.
С этой проблемой было связано много всего, но главное — делать это шаг за шагом и выполнять следующие предписанные шаги:
- нарисовать схему
- выделите соответствующие объекты и начертите для них диаграммы свободного тела
- выберите системы координат для схем, которые удобны
- разбить силы на компоненты в выбранной системе координат
- суммируйте силы в направлениях \ (x \) и \ (y \) и примените второй закон Ньютона для обоих направлений
- применить ограничения
- решить алгебру
Пример \ (\ PageIndex {2} \)
Трос закреплен на 50.Блок 0 кг в двух местах и проходит через систему из двух шкивов, как показано на схеме ниже. Блок опирается на шероховатую (коэффициент трения покоя 0,400) горизонтальную поверхность. Затем больший шкив тянет вверх с постепенно увеличивающейся силой. Оба шкива безмассовые и без трения, канат также безмассовый. Меньший шкив прикреплен к полу, и оба шкива расположены так, что веревка перпендикулярна полу на одном конце и параллельна ему на другом.Когда тяговое усилие достигает определенной величины, блок едва начинает скользить вправо. Вычислите величину этой тянущей силы.
- Решение
В этой задаче нет наклонной плоскости (хотя она может быть!), Но это хороший пример важности следования указанным выше предписаниям. Начните с диаграмм свободного тела и систем координат. FBD меньшего шкива не принесет нам ничего полезного, поэтому нужно нарисовать только два FBD.Обратите внимание, что натяжение на стороне блока происходит от той же веревки, что и натяжение на верхней части блока, поэтому они равны:
Блок вообще не ускоряется (как и шкив), поэтому сумма сил в каждом из направлений \ (x \) и \ (y \) равна нулю.
\ [\ begin {array} {l} block: \; \; \ begin {array} {l} x — направление \; силы: \; \; 0 = T — f \\ y — направление \; силы: \; \; 0 = T + N-mg \ end {array} \\ шкив: \; \; y — направление \; силы: \; \; 0 = тянуть — 2T \ end {array} \ nonumber \]
Если нам нужно тянуть «достаточно сильно», чтобы заставить блок двигаться, то это происходит, когда горизонтальное усилие равно максимальной силе статического трения, что дает нам уравнение ограничения:
\ [f = \ mu_S N \ nonumber \]
Обратите внимание, что блок должен начать скользить, прежде чем он начнет подниматься, потому что для подъема требуется, чтобы нормальная сила была равна нулю, и он будет скользить, когда сила статического трения мала, но не равна нулю.Теперь решите уравнения одновременно, чтобы получить:
\ [pull = \ boxed {280N} \ nonumber \]
Включая движение
Мы сделали два примера с системами, для которых ускорение равно нулю. Но, конечно, возможно, что проблема действительно связана с ускорением объектов. Иногда нас просят найти это ускорение, а иногда ускорение — это часть информации, которая дается. Ускорение может быть задано напрямую, или, возможно, оно может быть вычислено другим способом, возможно, исходя из кинематики или если движение является круговым.Знание чего-либо о движении объекта подпадает под категорию «ограничений», потому что движение задано (ограничено), что приводит к уравнениям, которые не являются результатом второго закона Ньютона. Мы рассмотрим пример, в котором используются шаги для решения задач механики, которые также включают дополнительное ограничение кругового движения. Прежде чем мы это сделаем, попробуйте следующий пример:
Пример \ (\ PageIndex {3} \)
К одному концу безмассовой пружины прикреплен блок, другой конец которого прикреплен к вертикальному неподвижному штифту на горизонтальной поверхности без трения.Блок вращается по кругу, и в результате этого движения пружина растягивается. Фактически, чем быстрее движение, тем больше растягивается пружина. Чтобы растянуть любую пружину, нужно одновременно тянуть за оба конца. Ясно, что колышек натягивает один конец пружины, когда блок движется по кругу, но какая сила тянет блок наружу, чтобы растянуть пружину?
- Решение
Блок не вытащил наружу ! Он только втягивается внутрь (пружиной).Чтобы растянуть пружину, нужно вытянуть наружу не блок, а пружину, которую нужно потянуть таким образом. Пружина втягивает блок внутрь (удерживая его центростремительное ускорение), и сила третьего закона, действующая на пружину, тянет пружину наружу.
Это, возможно, лучше, чем любой другой пример, указывает на важность изоляции объектов с помощью силовых диаграмм. Блок здесь не является проводником для какой-то таинственной силы, вытягивающей пружину, — это объект, вытягивающий пружину.Вам нужно полностью доверять третьему закону, чтобы получить силу между пружиной и блоком, и вам нужно полностью доверять второму закону, чтобы понять, что блок не требует дополнительной силы, направленной наружу, чтобы уравновесить силу пружины, потому что ускоряется.
Теперь об обещанном примере, который включает движение в соответствии с пошаговыми инструкциями, приведенными ранее. Что делает эту проблему интересной, так это информация, которая скрыта внутри формулировки …
Камень на тетиве летает по кругу в вертикальной плоскости (при наличии земной силы тяжести) так, что едва достигает вершины (струна остается натянутой на всю длину, но нет натяжения) продолжая свой круговой путь.Найдите скорость камня по длине струны.
- выделите соответствующие объекты и начертите для них диаграммы свободного тела
- выбрать системы координат для схем, которые удобны
В качестве положительного направления \ (y \) выберем вниз.
- силы разрыва на компоненты в выбранной системе координат
Здесь нет необходимости.
- суммируйте силы в направлениях \ (x \) и \ (y \) и примените второй закон Ньютона в обоих направлениях
\ [a = \ dfrac {\ sum {F_y}} {m} = \ dfrac {T + mg} {m} \]
Первое ограничение состоит в том, что скала почти не перемещается. Что это значит? Чтобы ответить на этот вопрос, подумайте, что бы произошло, если бы камень двигался медленнее … Он бы выпал из круга, а это значит, что струна не останется прямой. Это означало бы, что напряжение равно нулю.2} {l} \]
Достаточно просто:
\ [v = \ sqrt {gl} \]
Хотя это довольно простой пример с точки зрения предпринятых шагов, он указывает на один очень важный аспект этих проблем. Если вы не тратите некоторое время на размышления о том, что происходит физически, вы, скорее всего, упустите из виду «скрытую» информацию в формулировке проблемы. Это не уловка, чтобы сбить вас с толку — это именно то, с чем вы сталкиваетесь в реальном мире, когда вам нужно решить реальную проблему.Вам необходимо уметь преобразовывать описательные аспекты системы в математически анализируемые величины.
Пример \ (\ PageIndex {4} \)
Тетербол вращается вокруг шеста, делая полный круг каждые 1,5 секунды. Общая длина веревки — 2,4 м. Вычислите угол θ, который веревка образует с шестом. Веревка имеет незначительную массу.
- Решение
Начните с диаграммы силы мяча, включая систему координат:
Затем сложите силы по осям \ (x \) и \ (y \) и примените второй закон Ньютона:
\ [\ begin {array} {l} a_x = \ dfrac {T \ sin \ theta} {m} \\ a_y = \ dfrac {T \ cos \ theta — mg} {m} \ end {array} \ nonumber \]
Ускорение в направлении \ (x \) центростремительное, с радиусом его кругового движения, равным горизонтальному участку прямоугольного треугольника, гипотенуза которого равна длине струны.o} \ nonumber \]
Шкив
— Энциклопедия Нового Света
Шкив корабля. В этом контексте шкивы обычно называют блоками.
Шкив представляет собой колесо с канавкой по краю для удержания троса или кабеля. Это простая машина, которая помогает изменять направление и точку приложения тягового усилия. Шкивы обычно используются в наборах, предназначенных для уменьшения силы, необходимой для подъема груза. Величина силы уменьшается, но она должна действовать на большем расстоянии.Следовательно, объем работы, необходимый для того, чтобы груз достиг определенной высоты, такой же, как и объем работы, необходимой без шкивов.
Шкивы
можно найти в самых разных сферах применения. Они не только используются для очевидного подъема объектов, например с помощью кранов, но также используются в современных автомобилях и самолетах. Шкивы также необходимы для большинства машин в той или иной форме.
История
Как и все простые машины, происхождение шкива неизвестно.Когда древние люди поднимали тяжелые предметы, перебрасывая лозы или другие грубые веревки через ветви деревьев, они использовали идею единственного фиксированного шкива, чтобы изменить направление силы. Но поскольку колеса вращаться не было, такое использование приводило к значительному трению.
Самые ранние свидетельства использования шкивов относятся к Древнему Египту во времена Двенадцатой династии (1991–1802 гг., г. до н. Э., г.), хотя они, вероятно, использовались не для получения механического преимущества, а для изменения направления тяги. [1] Есть также свидетельства их использования в Месопотамии в начале второго тысячелетия до н. Э. [2]
Не указано, когда и кем был впервые разработан шкив. Однако считается, что Архимед разработал первую задокументированную систему шкивов с блокировкой и захватом, как это было зарегистрировано Плутархом. Плутарх сообщил, что Архимед передвинул целый военный корабль, груженый людьми, используя составные шкивы и свою собственную силу.
Типы шкивов
- Фиксированный Фиксированный или класс 1 Шкив имеет фиксированную ось.То есть ось «зафиксирована» или закреплена на месте. Фиксированный шкив используется для перенаправления силы в веревке (называемой ремнем, когда он проходит полный круг. Фиксированный шкив имеет механическое преимущество, равное единице.
- Подвижный Подвижный Шкив или класса 2 имеет свободную ось. То есть ось «свободна» перемещаться в пространстве. Подвижный шкив используется для преобразования сил. Подвижный шкив имеет двойное механическое преимущество. То есть, если один конец веревки закреплен, потянув за другой конец веревки, к объекту, прикрепленному к шкиву, приложится удвоенная сила.
- Составной шкив Составной шкив представляет собой комбинацию фиксированной и подвижной системы шкивов.
- Блок и захват — Блок Блок и захват представляет собой составной шкив, в котором на каждой оси установлено несколько шкивов, что дополнительно увеличивает механическое преимущество.
Шкивы могут изменять направление усилия.
Теория работы
Диаграмма 1 — Основное уравнение для шкива: В состоянии равновесия сила F на оси шкива равна и противоположна сумме натяжений в каждой линии, выходящей из шкива, и эти натяжения равны.
Диаграмма 2 — Простая система шкивов — один подвижный шкив, поднимающий единицу веса. Натяжение каждой линии составляет половину веса единицы, что дает преимущество в 2 раза.
Схема 2а — Еще одна простая система шкивов, аналогичная схеме 2, но в которой подъемная сила направлена вниз.
Практичный составной шкив, соответствующий диаграмме 2а.
Простейшая теория работы системы шкивов предполагает, что шкивы и стропы невесомые и что нет потерь энергии из-за трения.Также предполагается, что линии не растягиваются. Из этого предположения следует, что в состоянии равновесия общая сила на шкив должна быть равна нулю. Это означает, что сила на оси шкива распределяется поровну на две петли, проходящие через шкив. Ситуация схематично проиллюстрирована на диаграмме 1. В случае, когда линии не параллельны, напряжения в каждой линии по-прежнему равны, но теперь векторная сумма всех сил равна нулю.
Второе основное уравнение для шкива следует из сохранения энергии: произведение поднимаемого веса на расстояние, на которое он перемещается, равно произведению подъемной силы (натяжения в подъемной линии) на расстояние подъема. линия перемещена.Поднимаемый вес, разделенный на подъемную силу, определяется как преимущество шкивной системы.
Важно отметить, что объем работы, выполняемой на идеальном шкиве, всегда одинаков. Работа выражается умножением усилия на пройденное расстояние. Шкив просто позволяет менять усилие на расстояние.
На схеме 2 один подвижный шкив позволяет поднимать единицу веса только с половиной силы, необходимой для подъема веса без посторонней помощи. Общая необходимая сила делится между подъемной силой (красная стрелка) и «потолком», который представляет собой некоторый неподвижный объект (например, землю).В этой простой системе подъемная сила направлена в том же направлении, что и движение веса. Достоинства этой системы два. Хотя сила, необходимая для подъема единицы веса, составляет только половину веса единицы, нам нужно будет протянуть веревку длиной в два раза больше расстояния, на которое поднимается груз, чтобы общий объем проделанной работы (сила x расстояние) остается такой же.
Может быть добавлен второй шкив, как на схеме 2а, который просто служит для перенаправления подъемной силы вниз, это не меняет преимущества системы.
Схема 3 — Простая составная система шкивов — подвижный шкив и фиксированный шкив, поднимающий единицу веса. Натяжение каждой линии составляет одну треть веса единицы, что дает преимущество в три.
Схема 3a — Простая составная система шкивов — подвижный шкив и фиксированный шкив, поднимающие единицу веса, с дополнительным шкивом, перенаправляющим подъемную силу вниз. Натяжение каждой линии составляет одну треть веса единицы, что дает преимущество в три.
Схема 4a — Более сложная составная система шкивов. Натяжение в каждой линии составляет одну четверть веса единицы, что дает преимущество в четыре. Добавлен дополнительный шкив, перенаправляющий подъемную силу.
Рисунок 4b — Практичная система блока и подъемного шкива, соответствующая диаграмме 4a. Обратите внимание, что оси неподвижного и подвижного шкивов совмещены.
Добавление фиксированного шкива к системе с одним шкивом может дать увеличение преимущества.На схеме 3 добавление фиксированного шкива дает преимущество подъема в три раза. Натяжение в каждой линии составляет одну треть веса единицы, а сила, действующая на оси каждого шкива, составляет две трети веса единицы. Как и в случае со схемой 2а, можно добавить еще один шкив, чтобы изменить направление подъемной силы, но без увеличения преимущества. Эта ситуация показана на Диаграмме 3а.
Этот процесс можно продолжать бесконечно для идеальных шкивов, при этом каждый дополнительный шкив дает единичное преимущество.Однако для настоящих шкивов трение между канатом и шкивами будет увеличиваться по мере добавления шкивов до такой степени, что никакого преимущества невозможно. Он ограничивает количество шкивов, которые мы можем использовать на практике. Вышеупомянутые системы шкивов вместе известны как системы шкивов блока и захвата. На диаграмме 4а показана система блок-захвата с преимуществом четыре. Практическая реализация, в которой соединение с потолком объединено, а неподвижные и подвижные шкивы заключены в отдельные корпуса, показано на рисунке 4b.
Возможны и другие системы шкивов, и некоторые из них могут обеспечить большее преимущество с меньшим количеством шкивов, чем система блокировки и захвата. Преимущество системы блокировки и захвата состоит в том, что на каждый шкив и стропу действуют равные напряжения и силы. Эффективная конструкция требует, чтобы каждая стропа и шкив выдерживали нагрузку, и не более того. Для других конструкций шкивов потребуются стропы и шкивы различной прочности в зависимости от их положения в системе. Тем не менее, система блокировки и захвата может использовать повсюду один и тот же размер лески и может устанавливать фиксированные и подвижные шкивы на общей оси.
Использование шкивов
Шкивы использовались для подъема на протяжении тысячелетий. Самый распространенный и самый старый пример — их использование на кораблях и лодках. Блок и снасти были ключевым инструментом для подъема парусов и груза. Еще одно важное применение шкивов — подъемные краны.
Шкивы продолжают использоваться в наше время с различными машинами и системами. Даже в космическую эру шкивы играют важную роль в строительстве и эксплуатации космических кораблей и самолетов.Это система шкивов, которая управляет рулями направления для самолета. Фактически, шкивы обычно используются в повседневной жизни, от транспортных средств до движущегося оборудования.
Банкноты
- ↑ Дитер Арнольд, Здание в Египте: Каменная кладка фараонов (Oxford University Press, 1991, ISBN 978-0195063509).
- ↑ P.R.S. Мури, Древние месопотамские материалы и промышленность (Eisenbrauns, 1999, ISBN 978-1575060422).
Список литературы
- Арнольд, Дитер. Строительство в Египте: каменная кладка фараонов . Oxford University Press, 1991. ISBN 978-0195063509
- Delta Education. Рычаги и шкивы. Nashua, NH: Delta Education, 2000. ISBN 0875048110
- Хеллман, Гарольд, Хэл Хеллман и Линн Свит. Рычаг и шкив. Нью-Йорк, Нью-Йорк: М. Эванс и компания, Inc., 1971. ISBN 0871310724
- Мури, P.R.S. Древние материалы и промышленность Месопотамии . Eisenbrauns, 1999. ISBN 978-1575060422
- Продавец, Мик. Колеса, шкивы и рычаги. New York: Gloucester Press, 1993. ISBN 0531174204
Внешние ссылки
Все ссылки получены 13 января 2021 г.
Кредиты
Энциклопедия Нового Света Писатели и редакторы переписали и завершили статью Википедия
в соответствии со стандартами New World Encyclopedia . Эта статья соответствует условиям лицензии Creative Commons CC-by-sa 3.0 (CC-by-sa), которая может использоваться и распространяться с указанием авторства.Кредит предоставляется в соответствии с условиями этой лицензии, которая может ссылаться как на участников New World Encyclopedia, , так и на самоотверженных добровольцев Фонда Викимедиа. Чтобы процитировать эту статью, щелкните здесь, чтобы просмотреть список допустимых форматов цитирования. История более ранних публикаций википедистов доступна исследователям здесь:
История этой статьи с момента ее импорта в энциклопедию Нового Света :
Примечание. Некоторые ограничения могут применяться к использованию отдельных изображений, на которые распространяется отдельная лицензия.
Мощные шкивы — Урок — Инженерное дело
(0 Рейтинги)
Быстрый просмотр
Уровень оценки: 4
(3-5)
Требуемое время: 30 минут
Зависимость урока: Нет
Тематические области:
Геометрия, Физические науки, Решение проблем, Рассуждения и доказательства, Наука и технологии
Ожидаемые характеристики NGSS:
Резюме
Студенты продолжают изучать историю построения пирамиды, узнавая о простой машине, называемой шкивом.Они узнают, как можно использовать шкив для изменения направления приложенных сил и перемещения / подъема чрезвычайно тяжелых предметов, а также узнают о мощных механических преимуществах использования системы с несколькими шкивами. Студенты проводят простую демонстрацию, чтобы увидеть механическое преимущество использования шкива, и они определяют современные инженерные применения шкивов. На практике они видят, как шкив может изменять направление силы, разницу между фиксированными и подвижными шкивами и механическое преимущество, полученное при использовании нескольких / комбинированных шкивов.Они также узнают, как инженеры используют шкивы в повседневных целях.
Эта инженерная программа соответствует научным стандартам нового поколения (NGSS).
Инженерное соединение
Инженеры
являются экспертами в использовании преимуществ простых машин во всех видах реальных приложений, приносящих пользу обществу. Они включают механическое преимущество шкивов в свою конструкцию многих современных конструкций, машин, продуктов и инструментов, таких как краны, лифты, флагштоки, молнии, моторы, велосипедные кольца / цепи, веревки для белья, ведра / веревки для колодцев, устройства для скалолазания, жалюзи на окнах и парусные / рыболовные лодки.Используя несколько шкивов в сочетании с двигателями и электроникой, инженеры создают сложные современные устройства, которые выполняют большую работу при очень небольшой мощности.
Цели обучения
После этого урока учащиеся должны уметь:
- Продемонстрируйте, как используются шкивы.
- Объясните, как в древние времена инженеры могли использовать шкивы для работы.
- Определите современные приложения, в которых инженеры используют шкивы.
Образовательные стандарты
Каждый урок или задание TeachEngineering соотносится с одним или несколькими научными дисциплинами K-12,
образовательные стандарты в области технологий, инженерии или математики (STEM).
Все 100000+ стандартов K-12 STEM, охватываемых TeachEngineering , собираются, обслуживаются и упаковываются сетью стандартов достижений (ASN) ,
проект D2L (www.achievementstandards.org).
В ASN стандарты иерархически структурированы: сначала по источникам; например , по штатам; внутри источника по типу; например , естественные науки или математика;
внутри типа по подтипу, затем по классу, и т. д. .
NGSS: научные стандарты нового поколения — наука
| Ожидаемые характеристики NGSS | ||
|---|---|---|
3-ПС2-1.Спланируйте и проведите расследование, чтобы получить доказательства воздействия сбалансированных и неуравновешенных сил на движение объекта. (Класс 3) Вы согласны с таким раскладом? Спасибо за ваш отзыв! | ||
| Нажмите, чтобы просмотреть другие учебные программы, соответствующие этим ожиданиям от результатов. | ||
| Этот урок посвящен следующим аспектам трехмерного обучения NGSS: | ||
| Наука и инженерная практика | Основные дисциплинарные идеи | Сквозные концепции |
| Совместно спланируйте и проведите расследование для получения данных, которые послужат основой для доказательств, используя объективные тесты, в которых контролируются переменные и количество рассмотренных испытаний. Соглашение о выравнивании: В научных исследованиях используются различные методы, инструменты и техники. Соглашение о выравнивании: | Каждая сила действует на один конкретный объект и имеет как силу, так и направление. На покоящийся объект обычно действует несколько сил, но они складываются, чтобы получить нулевую чистую силу на объект.Силы, которые не равны нулю, могут вызывать изменения скорости или направления движения объекта. (Граница: на этом уровне используется качественное и концептуальное, но не количественное сложение сил.) Соглашение о согласовании: Соприкасающиеся предметы оказывают друг на друга силу. Соглашение о выравнивании: | Причинно-следственные связи обычно выявляются. Соглашение о выравнивании: |
| Ожидаемые характеристики NGSS | ||
|---|---|---|
3-ПС2-2. Вы согласны с таким раскладом? Спасибо за ваш отзыв! | ||
| Нажмите, чтобы просмотреть другие учебные программы, соответствующие этим ожиданиям от результатов. | ||
| Этот урок посвящен следующим аспектам трехмерного обучения NGSS: | ||
| Наука и инженерная практика | Основные дисциплинарные идеи | Сквозные концепции |
| Проведите наблюдения и / или измерения для получения данных, которые послужат основой для доказательства для объяснения явления или проверки проектного решения. Соглашение о выравнивании: Научные открытия основаны на распознавании закономерностей. Соглашение о выравнивании: | Можно наблюдать и измерять закономерности движения объекта в различных ситуациях; когда это прошлое движение демонстрирует регулярный образец, будущее движение может быть предсказано по нему. (Граница: технические термины, такие как величина, скорость, импульс и векторная величина, не вводятся на этом уровне, но разрабатывается концепция, согласно которой для описания некоторых величин требуется как размер, так и направление.) Соглашение о выравнивании: | Шаблоны изменений можно использовать для прогнозирования. Соглашение о выравнивании: |
Общие основные государственные стандарты — математика
- Умножаем и делим в пределах 100.(Оценка
3)Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом?
Спасибо за ваш отзыв!
- Умножайте или делите для решения словесных задач, связанных с мультипликативным сравнением, например.g., используя рисунки и уравнения с символом неизвестного числа для представления проблемы, отличая мультипликативное сравнение от аддитивного.
(Оценка
4)Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом?
Спасибо за ваш отзыв!
Международная ассоциация преподавателей технологий и инженерии — Технология
ГОСТ
Предложите выравнивание, не указанное выше
Какое альтернативное выравнивание вы предлагаете для этого контента?
Рабочие листы и приложения
Посетите [www.teachengineering.org/lessons/view/cub_simple_lesson05], чтобы распечатать или загрузить.
Больше подобной программы
Поднимите собственный вес
Используя обычные материалы (катушки, веревку, мыло), учащиеся узнают, как можно использовать шкив, чтобы легко изменить направление силы, облегчая перемещение больших объектов. Они видят разницу между фиксированными и подвижными шкивами и механическое преимущество, полученное при использовании нескольких / комбинированных шкивов….
Инженерное дело: простые машины
Студенты знакомятся с шестью типами простых машин — клином, колесом и осью, рычагом, наклонной плоскостью, винтом и шкивом — в контексте построения пирамиды, получая общее представление об инструментах, которые использовались с тех пор. древние времена и используются до сих пор.
Рычаги подъема
Студенты знакомятся с тремя из шести простых механизмов, используемых многими инженерами: рычагом, шкивом и колесно-осевым механизмом. Как правило, инженеры используют рычаг для увеличения силы, приложенной к объекту, шкив для подъема тяжелых грузов по вертикальному пути и колесо с осью для увеличения крутящего момента…
Давайте переместим!
Учащиеся изучают методы с использованием простых машин, которые, вероятно, использовались при строительстве древних пирамид, а также обычную современную транспортировку материалов. Они узнают о колесе и оси как о средстве транспортировки материалов из карьера на строительную площадку.
Предварительные знания
Общие сведения о пирамидах. Знакомство с шестью простыми машинами, представленными в Уроке 1 этого раздела.
Введение / Мотивация
Мы активно изучаем простые машины и строим древние египетские пирамиды, которые были наняты инженерами для проектирования и строительства.Теперь мы собираемся углубиться в наше понимание шкивов, чтобы увидеть, можем ли мы использовать эти знания, чтобы упростить работу нашего .
Никто точно не знает, были ли шкивы одной из простых машин , которые древние культуры использовали для строительства пирамид. Некоторые люди считают, что красивые и массивные пирамиды не могли быть построены с использованием чего-то столь же простого, как простые машины. У некоторых людей есть дикие теории о том, как возникли пирамиды — возможно, пришельцы с другой планеты пришли на Землю и построили их.Что ж, мы не знаем об этом, но мы знаем, что люди очень творческие и находчивые, когда они этого хотят. Пока мы ограничиваемся материалами и технологиями, которые были доступны древним египтянам, для нас приемлемо использовать наши знания для создания систем шкивов для построения нашей пирамиды.
Рис. 2. Шкив рыболовного судна. Авторское право
Copyright © 2004 Microsoft Corporation, One Microsoft Way, Redmond, WA 98052-6399 USA. Все права защищены.
Шкив представляет собой простую машину, состоящую из струны (или веревки), обернутой вокруг колеса (иногда с канавкой), с одним концом струны, прикрепленным к объекту, а другим концом, прикрепленным к человеку или двигателю. Шкивы могут показаться простыми, но они могут обеспечить мощное механическое преимущество, позволяющее легко выполнять подъемные операции.
Шкивы используются в повседневной жизни по-разному. Какие шкивы вы можете придумать? Некоторыми распространенными примерами являются большие строительные краны, которые используют шкивы для подъема тяжелых предметов с помощью двигателя, который обычно является очень слабым (см. Рисунок 1), силовые тренажеры в спортзале, некоторые лифты, флагштоки, оконные жалюзи, велосипедные кольца / цепи, бельевые веревки и т. ведро / веревка для водяного колодца, тросы, моторы, устройства для скалолазания, а также парусные и рыболовные лодки (см. Рисунок 2).
Лифт — это современная инженерная система, использующая шкив, которая работает так же, как подъем большого камня при строительстве пирамиды. Без использования шкивов лифту потребовался бы большой двигатель, чтобы тянуть кабель прямо вверх. Вместо использования большого двигателя в некоторых лифтах используется большой вес, который использует силу тяжести , чтобы помочь поднять кабину лифта (см. Рисунок 3). В этой ситуации приводной двигатель может быть намного меньше и использоваться только для определения направления, в котором должен двигаться лифт.
Рис. 3. Добавление противовеса и двух шкивов с двигателем в середине упрощает перемещение лифта. Авторское право
Авторские права © Джастин Фриттс, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2005.
Но как колесо с веревкой может помочь нам перемещать огромные камни, необходимые для постройки пирамиды? Что ж, шкивы помогают нам, изменяя направление силы силы , которую мы используем для подъема объекта. Вам легче подтянуться на веревке или потянуть вниз? Используя шкив, нам не нужно тянуть вверх за веревку, чтобы поднять прикрепленный к ней тяжелый предмет, но вместо этого мы можем потянуть за нее.Представьте себе флагшток в качестве примера. Когда вы тянете за веревку флагштока, флаг поднимается вверх по полюсу и развевается в воздухе. Это потому, что на флагштоке есть шкив. Используя шкивы для направления силы перенаправления , камень можно было поднять с земли, что позволило большему количеству людей ухватиться за веревку и увеличило вес, поэтому рабочим приходилось меньше тянуть. Чтобы еще больше упростить это усилие, рабочие, использующие шкив, могли перемещать большой камень вверх по пандусу, натягивая веревку при спуске по пандусу, используя силу тяжести в своих интересах.
Настоящее механическое преимущество шкива заключается в использовании нескольких шкивов одновременно. Использование нескольких шкивов уменьшает силу, необходимую для перемещения объекта, за счет увеличения длины веревки, используемой для подъема объекта. Механическое преимущество (MA) шкивной системы равно количеству тросов, поддерживающих подвижную нагрузку. (Это означает, что не считайте веревки, которые — только , используемые для перенаправления, см. Рисунки 6 и 7.) Из других уроков по простым машинам мы знаем, что для получения большего механического преимущества существует компромисс.Со шкивом компромисс — расстояние. Таким образом, если два шкива используются вместе, требуемое усилие уменьшается вдвое, но требуется вдвое больше веревки, чтобы поднять объект на ту же желаемую высоту. (Проиллюстрируйте эту концепцию студентам, проведя следующую демонстрацию в классе; см. Рисунок 4.)
Рис. 4. (слева) Используя один виток веревки, сложно стянуть метлы вместе. (справа) Использование нескольких оберток упрощает сборку веников.авторское право
Авторское право © Джастин Фриттс, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2005 г.
Демонстрация классной метлы и веревки:
Для этой демонстрации требуются три студента, две метлы и ~ 6 метров веревки. Привяжите веревку к одной из метел (метла 1) и оберните ее вокруг другой метлы (метла 2). Попросите двух учеников встать на расстоянии примерно метра друг от друга, каждый держит по одной метле, и постарайтесь держать метлы разделенными, пока третий ученик тянет за свободный конец веревки; Собрать палки метлы должно быть непросто.Затем снова оберните веревку вокруг каждой метлы. Попробуйте еще раз собрать учеников / метлы вместе; чем чаще вы наматываете веревку на метлы, тем легче третьему ученику стягивать остальных вместе! Это пример, демонстрирующий силу механического преимущества. Обратитесь к соответствующему упражнению «Тяга к собственному весу», чтобы помочь учащимся лучше понять системы шкивов, проиллюстрировав, как шкив можно использовать для легкого изменения направления силы, облегчая перемещение больших объектов.
Шкивы могут быть намного сложнее. Инженеры объединяют множество шкивов в систему шкивов, которая значительно снижает силу, необходимую для подъема объекта. Они часто используют системы шкивов для перемещения очень тяжелых предметов. Блок и снасть — это пример системы шкивов, которую можно прикрепить к чему угодно. Для этого может потребоваться много троса или веревки, но человек, использующий достаточное количество шкивов, может поднять несколько тонн. Инженеры используют блоки и подъемники вместе с двигателями и электроникой для создания современных устройств, которые работают с очень низким энергопотреблением, таких как краны и лифты.В Диснейленде инженеры даже используют систему шкивов, чтобы перемещать Тинкербелл по небу.
Мы не уверены, использовали ли египтяне шкивы, и еще не нашли никаких доказательств того, что они использовали, но мы знаем, что если бы они использовали их, жизнь была бы легче, чем если бы они этого не делали. Теперь, когда мы разбираемся в шкивах и располагаем современными материалами, мы можем строить пирамиды намного проще. Сегодня мы собираемся взглянуть на разработку системы шкивов и посмотреть, сможем ли мы разработать способ доставить наши самые тяжелые камни на вершину нашей пирамиды с помощью этой простой машины.
Предпосылки и концепции урока для учителей
Используйте презентацию PowerPoint «Шкивы и пирамиды» как полезный инструмент в классе. (Покажите презентацию PowerPoint или распечатайте слайды для использования с проектором. Презентация анимирована, чтобы продвигать стиль, основанный на запросах; каждый щелчок раскрывает новую точку зрения о каждой машине; попросите учащихся предложить характеристики и примеры, прежде чем вы их покажете .)
Шкив, простой механизм, помогает выполнять работу, изменяя направление сил и облегчая перемещение крупных объектов.Когда мы думаем о шкивах, большинство людей думают о типе шкива, который позволяет человеку перенаправлять направление силы. При использовании этого типа шкива, называемого фиксированным шкивом , при опускании веревки объект поднимается над землей. Существуют также подвижные шкивы и системы шкивов . Тысячи лет назад первые инженеры использовали шкивы для облегчения строительства и выполнения многих полезных повседневных задач. Многие обелиски были возведены с помощью шкивов, а в колодцах есть шкивы для сбора воды.
Фиксированные шкивы
Рис. 5. Фиксированный шкив без механического преимущества. Авторское право
Авторское право © Дениз У. Карлсон, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2007.
Наиболее распространенная концепция шкива заключается в том, что это простой механизм, перенаправляющий силу. Это означает, что, обматывая веревку вокруг шкива и прикрепляя веревку к объекту, человек тянет веревку вниз, чтобы поднять объект, вместо того, чтобы поднимать объект (см. Рисунок 5; представьте, что поднимаете флаг).Хотя это полезное и удобное использование шкивов, у него есть серьезное ограничение: сила, которую вы должны приложить, чтобы поднять объект, была такой же, как если бы вы просто поднимали объект без шкива (что приемлемо для поднятия флажка, но недостаточно помогает при попытке поднять камень пирамиды). Это означает, что фиксированный шкив не дает никаких механических преимуществ.
Фиксированная конфигурация шкива полезна для поднятия объекта на уровень над вашей головой. Использование этого типа шкива также позволяет использовать силу тяжести.И, прикрепив веса к концу веревки, которую вы тянете, вы можете уменьшить силу, которую вы должны приложить. Этот тип шкива также можно использовать для балансировки объекта, прикрепляя предметы равного веса к обеим сторонам веревки, при этом ни один объект не перемещается. После приложения силы к любой из сторон система продолжает движение в этом направлении. Такая система шкивов используется в некоторых лифтах. К лифту прикреплен трос, который поднимается вокруг шкива, затем опускается и прикрепляется к противовесу.Двигатель, приводящий в движение кабину лифта, потребляет гораздо меньше энергии, поскольку противовес удерживает лифт в равновесии.
Подвижные шкивы
Рис. 6. Подвижный шкив с механическим преимуществом двух. Авторское право
Авторские права © Дениз У. Карлсон, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2007.
Другой тип шкива — подвижный шкив. В системе с подвижным шкивом канат прикреплен к фиксированной (неподвижной) точке, шкив прикреплен к объекту, который вы хотите переместить, а другой конец каната остается свободным (см. Рисунок 6).При натяжении веревки шкив перемещается, и объект поднимается. Этот тип системы хорош, если вы пытаетесь поднять объект, расположенный под вами, до вашего уровня. В другом варианте, если обе стороны подвижной системы шкивов зафиксированы, а веревка натянута между фиксированными точками, система становится похожей на колесо и ось, потому что объект может перемещаться по веревке, если к нему приложена сила (например, , почтовый индекс).
Шкивные системы
Рис. 7. Система шкивов с механическим преимуществом двух.авторское право
Авторские права © Дениз Карлсон, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2007.
Рис. 8. Система шкивов с механическим преимуществом в четыре, поскольку она имеет четыре несущих нагрузку сегмента веревки. Авторское право
Авторские права © Дениз У. Карлсон, Программа ITL, Инженерный колледж, Университет Колорадо в Боулдере, 2007.
Использование системы шкивов может быть гораздо более сложным и дает мощное механическое преимущество — значительно уменьшая силу, необходимую для перемещения объекта.Если используется один подвижный шкив (Рисунок 6), сила, необходимая для подъема объекта, прикрепленного к подвижному шкиву, уменьшается вдвое. Система шкивов, показанная на Рисунке 7, не меняет механического преимущества, показанного на Рисунке 6, однако она меняет направление необходимой силы. Компромисс заключается в том, что количество требуемой веревки увеличивается, а также увеличивается количество веревки, которую вы должны тянуть, чтобы поднять объект. Если к системе добавлены два фиксированных шкива и к объекту прикреплен второй подвижный шкив, сила, необходимая для подъема объекта, станет четвертью веса объекта, и потребуется в четыре раза больше веревки (см. Рисунок 8). презентация PowerPoint «Шкивы и пирамиды»).
Механическое преимущество
Сильное механическое преимущество шкива заключается в использовании нескольких шкивов одновременно. Комбинирование нескольких шкивов уменьшает силу, необходимую для перемещения объекта, за счет увеличения длины веревки, используемой для подъема объекта. Количество веревки можно найти по формуле веревка = исходное количество веревки x количество шкивов. Механическое преимущество (MA) шкивной системы равно количеству тросов, поддерживающих подвижную нагрузку. (Это означает, что не учитывайте веревки, которые используются только для перенаправления, см. Рисунки 6, 7 и 8.)
Сопутствующие мероприятия
Закрытие урока
Как шкивы могут облегчить нам жизнь? Шкивы — мощные простые машины. Они могут изменить направление силы, что может значительно облегчить нам перемещение чего-либо. Если мы хотим поднять объект весом 10 килограммов на высоту одного метра, мы можем поднять его прямо вверх или использовать шкив, чтобы мы могли потянуть за один конец, чтобы поднять объект.Использовать шкив намного проще, потому что, пока мы весим более 10 килограммов, мы можем просто повиснуть за конец веревки и воспользоваться силой тяжести, так что наш вес обеспечивает всю необходимую силу для подъема объекта.
Шкивы
также могут дать нам механическое преимущество, если мы используем несколько веревок вместе и больше. Этот процесс уменьшает количество силы, необходимой для поднятия чего-либо.
Хотя мы не знаем, использовались ли шкивы древними строителями пирамид, мы знаем, что шкивы — идеальная простая машина для многих задач, необходимых для строительства пирамиды.В сегодняшнем высокотехнологичном мире инженеры по-прежнему используют шкивы для облегчения сложных задач. Без них наша жизнь была бы намного труднее.
Проведите итоговую оценку, как описано в разделе «Оценка». В заключение завершите таблицу KWL и задайте задачи со словами, в которых учащиеся вычисляют механическое преимущество наклонной плоскости (см. Раздел «Оценка»).
На других уроках этого раздела студенты изучают каждую простую машину более подробно и видят, как каждую из них можно использовать в качестве инструмента для построения пирамиды или современного здания.
Словарь / Определения
Фиксированный шкив: система шкивов, в которой шкив прикреплен к фиксированной точке, а веревка прикреплена к объекту.
сила: толкать или тянуть объект; способность выполнять работу.
гравитация: естественная сила притяжения, оказываемая Землей на объекты на ее поверхности или вблизи нее, стремящаяся притягивать их к центру тела.
механическое преимущество: преимущество, полученное за счет использования простых машин, позволяющих выполнять работу с меньшими усилиями. Облегчение задачи (что означает меньшее усилие), но может потребоваться больше времени или места для работы (большее расстояние, веревка и т. Д.). Например, приложение меньшей силы на большем расстоянии для достижения того же эффекта, что и приложение большой силы на небольшом расстоянии. Отношение выходной силы, прилагаемой к машине, к приложенной к ней входной силе.
подвижный шкив: система шкивов, в которой шкив прикреплен к объекту; один конец веревки прикреплен к фиксированной точке, а другой конец веревки свободен.
шкив: простой механизм, который изменяет направление силы, часто для подъема груза. Обычно состоит из рифленого колеса, в котором движется натянутый трос или цепь.
перенаправить силу: чтобы изменить направление вашего толчка или тяги, чтобы получить преимущество над задачей.
простая машина: машина с небольшим количеством движущихся частей или без них, которая используется для облегчения работы (дает механическое преимущество). Например, клин, колесо и ось, рычаг, наклонная плоскость, винт или шкив.
работа: сила, действующая на объект, умноженная на расстояние, на которое он перемещается. W = F x d (сила, умноженная на расстояние).
Оценка
Оценка перед уроком
Мозговой штурм: Предложите учащимся провести открытое обсуждение в классе. Напомните студентам, что в ходе мозгового штурма ни одна идея или предложение не являются «глупыми». Все идеи следует уважительно выслушивать. Занять некритическую позицию, поощрять дикие идеи и препятствовать критике идей.Попросите их поднять руки, чтобы ответить. Напишите их идеи на доске. Спросите у студентов:
- Что такое простые машины? В чем преимущество простых машин? (Возможные ответы: машина с небольшим количеством движущихся частей или без них, которая используется для облегчения работы. Простые машины облегчают работу, создавая механическое преимущество, например, заменяя большее расстояние за меньшее усилие.)
- Почему инженеры заботятся о простых машинах? (Ответ: Современное оборудование, конструкции и инструменты используют простые машинные принципы для выполнения простых и сложных задач.Хотя вы, возможно, никогда не увидите шкив в действии на стройплощадке, шкивы спрятаны внутри двигателей, внутри кранов и все время работают за кулисами.)
Таблица «Знай / Хочу знать / Учиться» (KWL): Создайте классную диаграмму KWL, чтобы помочь организовать изучение новой темы. На большом листе бумаги или классной доске нарисуйте таблицу с заголовком «Простые машины: шкивы». Нарисуйте три столбца с названиями K, W и L, представляющие, что студенты знают о шкивах, что они хотят, чтобы знал о шкивах и что они узнали о шкивах и их механических преимуществах.Заполняйте разделы K и W во время введения к уроку по мере появления фактов и вопросов. Заполните L-часть в конце урока.
Оценка после введения
Вопросы для обсуждения: Запрашивайте, объединяйте и обобщайте ответы студентов.
- Что мы наблюдали во время демонстрации метлы и веревки? Каков был эффект от добавления шкивов? (Возможные ответы: шкивы в действии, использование механических преимуществ для облегчения работы, добавление большего количества шкивов (обмоток веревки), которые упростили стягивание двух щеток вместе.)
- Объясните, как найти механическое преимущество системы шкивов. (Ответ: механическое преимущество шкива в том, что система равна количеству веревок, поддерживающих подвижный шкив.)
- В чем заключается преимущество механического преимущества в системе шкивов? (Ответ: расстояние или длина веревки.)
- Какие примеры современных изделий разработали инженеры со шкивами? (Возможные ответы: краны, лифты, блоки и снасти на лодках, флагштоки, тросы, моторы, велосипедные кольца / цепи, устройства для скалолазания, оконные жалюзи и парусные лодки.)
Итоги урока Оценка
Таблица KWL (Заключение): Как класс, закончите столбец L таблицы KWL, как описано в разделе «Оценка перед уроком». Составьте список всего, что студенты узнали о шкивах и их механических преимуществах. Были ли даны ответы на все вопросы W? Что нового они узнали? Можно ли использовать шаблон, основанный на их наблюдениях за движением объекта, для предсказания будущего движения?
Задачи со словами: Оцените понимание учащимися концепций урока, задав следующие задачи со словами.Напишите на доске: Механическое преимущество системы шкивов = количество отрезков каната, поддерживающих нагрузку.
- Если бы мы использовали один фиксированный шкив и хотели поднять камень на 100 метров, сколько силы и веревки потребовалось бы, чтобы поднять 500-килограммовый камень? (Ответ: сила равна весу камня, поэтому 500 килограммов. Поскольку мы используем только один шкив, веревка должна быть не менее 100 метров [расстояние от шкива до камня], но больше вероятно, будет около 200 метров [одна длина до шкива от камня и одна длина от шкива до вас].)
- Если бы мы использовали 10 шкивов в системе и хотели бы поднять камень на 100 метров, сколько силы и веревки нам понадобилось бы, чтобы поднять тот же самый 500-килограммовый камень? (Ответ: Сила может быть уменьшена до 1/10 веса камня [50 килограммов], поскольку у нас будет 10 веревок со шкивами. Однако нам легко понадобится 1000 метров веревки [в 10 раз больше длины одной веревки] или 2000 метров, если бы мы были на одном уровне со скалой.)
Мероприятия по продлению урока
Попробуйте сделать человеческий шкив.Вам понадобится доска, прочная веревка и место с верхней опорой, например, футбольные ворота или игровая площадка. Оберните один конец веревки вокруг веревки 2 x 4 (или чего-нибудь прочного, например, сиденья от качелей), а другой конец веревки оберните вокруг ворот так, чтобы задний конец висел на земле. Позвольте одному ребенку сесть на 2 x 4, пока двое других детей пытаются поднять их, потянув за свободный конец веревки. Оборачивайте веревку вокруг ворот или опоры, пока двое детей не смогут легко поднять и опустить сидящего ребенка.Может быть полезно начать сидящего ребенка из положения стоя (обе ноги на земле).
Если учащиеся не знакомы с зиплайном, предложите им изучить это в Интернете. Застежка-молния — забавный пример подвижного шкива.
Предложите более продвинутым ученикам вычислить механическое преимущество использования нескольких шкивов, требующих деления с остатками или дробями.
Рекомендации
Словарь.com. ООО «Издательская группа« Лексико ». По состоянию на 25 января 2006 г. (Источник некоторых словарных определений с некоторой адаптацией) http://www.dictionary.com
Авторские права
© 2005 Регенты Университета Колорадо.
Авторы
Джастин Фриттс; Лоуренс Э. Карлсон; Жаклин Салливан; Малинда Шефер Зарске; Дениз Карлсон, при участии студентов, участвовавших в курсе подготовки инженерного корпуса К-12 весной 2005 года.
Программа поддержки
Комплексная программа преподавания и обучения, Инженерный колледж, Университет Колорадо в Боулдере
Благодарности
Содержание этих программ электронных библиотек было разработано в рамках Комплексной программы преподавания и обучения в рамках гранта GK-12 Национального научного фонда. 0338326. Однако это содержание не обязательно отражает политику Национального научного фонда, и вам не следует предполагать, что оно одобрено федеральным правительством.
Последнее изменение: 17 мая 2021 г.
Как работают шкивы? — Объясните, что Stuff
Как работают шкивы? — Объясни это
Рекламное объявление
Криса Вудфорда. Последнее изменение: 14 сентября 2020 г.
Вы, наверное, видели этих потрясающих телезрителей, которые умеют тянуть машины
своими волосами и волочить поезда зубами. Но знаете ли вы
наука тоже может сделать тебя сильным? Если вам нужно поднимать большие веса,
не напрягайте спину: используйте силу науки — и удивительный
Устройство под названием шкив .Давайте подробнее рассмотрим, как они работают!
Фото: шкив, установленный на огромной подъемной раме для большей безопасности. Благодаря силе шкивов один человек может поднять намного больше, чем его собственный вес, не напрягая никаких мышц, потому что несколько веревок или цепей выдерживают дополнительный вес. Фото Р. Б. Хотарда любезно предоставлено Корпусом морской пехоты США.
Что такое шкивы?
Шкив — это просто набор из одного или нескольких колес, на которые вы натягиваете веревку, чтобы упростить подъем предметов.
Шкивы — это примеры того, что ученые называют простыми механизмами. Это не значит, что они забиты двигателями и
шестерни; это просто означает, что они помогают нам умножать силы. Если вы хотите поднять действительно тяжелый
веса, ваши мышцы могут дать только такую силу, даже если
ты самый сильный человек в мире. Но используйте простую машину, такую как
шкив, и вы можете эффективно увеличить силу, производимую вашим телом.
Давайте проясним массу и вес!
Прежде чем мы продолжим, давайте очень четко определим разницу между весом и массой.Это поможет в тот момент, когда мы говорим об использовании шкивов для подъема грузов (которые на самом деле масс ) с определенной силой сил . В двух словах:
- Масса — это количество материала, из которого что-то сделано или содержится, измеренное в килограммах (или фунтах).
- Вес — это величина силы , с которой гравитация Земли воздействует на определенную массу:
Чем массивнее что-то, тем больше гравитационная сила и тем больше, как мы говорим, оно весит.
Фото: Сколько силы в ньютоне? Этот апельсин имеет массу около 100 г (0,1 кг), поэтому мне нужно приложить 1 Н (один ньютон) силы, чтобы удерживать его в воздухе. Грубо говоря, апельсин «весит» 100 г; Собственно говоря, он весит 1Н.
Если вы человек с массой 80 кг, гравитация Земли тянет вас с силой 800 ньютонов.
(на Земле ваш вес в ньютонах всегда примерно в 10 раз больше вашей массы в килограммах, потому что
Земля притягивает каждый килограмм массы с силой 10 ньютонов).Строго говоря, мы должны взвешивать вещи в единицах силы (ньютонах), поэтому, если ваша масса
80 кг, ваш вес действительно 800 ньютонов. Но в повседневной речи мы склонны путать массу и вес и вместо этого говорить о весе в килограммах (или фунтах). Точно так же, хотя килограмм — это единица массы, а не силы, можно говорить о силе, эквивалентной данной массе, потому что все массы
обычно таким же образом преобразуются в силы. Подробнее об этом читайте в нашей статье о
гири и противовесы.
Как работают шкивы
Чем больше у вас колес и чем чаще вы обматываете их веревкой, тем больше вы можете поднять.
Одно колесо
Если у вас есть одно колесо и веревка,
шкив помогает изменить направление подъемной силы. Таким образом
на картинке ниже вы тянете веревку вниз, чтобы поднять
взвесить. Если вы хотите поднять что-то весом 100 кг, у вас есть
тянуть вниз с силой, эквивалентной 100 кг, что составляет 1000 Н (ньютонов). Если вы хотите поднять
груз на 1 м в воздух, вы должны вытащить свободный конец веревки в сумме
расстояние 1 м на другом конце.
Иллюстрация: Как работают шкивы №1: С одним колесом шкив просто меняет направление силы, которую вы прикладываете. Никаким другим образом это не изменяет силу.
Два колеса
Теперь, если вы добавите еще колеса и обвяжите их веревкой,
вы можете уменьшить усилия, необходимые для подъема веса.
Предположим, у вас есть два колеса и обвитая вокруг них веревка, как показано на рисунке ниже.
Масса 100 кг (вес 1000 ньютон) теперь эффективно поддерживается двумя секциями одной и той же веревки.
(две нити слева) вместо одной (не обращая внимания на свободный конец веревки, за которую вы тянете),
а это значит, что вы можете поднять его, потянув с силой всего 500 ньютонов — вдвое меньше!
Вот почему мы говорим шкив с двумя колесами и веревку, обернутую вокруг него
таким образом, дает механическое преимущество (ME), равное двум.
Механическое преимущество — это мера того, насколько простая
машина умножает силу. Чем больше механическое преимущество, тем меньше силы вам потребуется,
но на большем расстоянии вы должны использовать эту силу. Вес поднимается на 1 м, но теперь мы
необходимо потянуть свободный конец веревки вдвое дальше (2 м). Почему? Чтобы вес поднялся на 1 м, вам нужно сделать так, чтобы две части веревки, поддерживающие его, поднялись на 1 м каждая. Для этого нужно потянуть свободный конец веревки на 2 метра.
Обратите внимание, что мы также можем вычислить механическое преимущество, разделив
расстояние, на которое мы должны тянуть веревку, зависит от расстояния, на которое перемещается вес.
Иллюстрация: Как работают шкивы №2: С двумя колесами это как если бы груз висел на двух веревках (две нити одной веревки слева), а шкив вдвое уменьшает необходимую вам подъемную силу. Это все равно, что поднимать гирю на двух веревках вместо одной. Но теперь вам нужно потянуть конец веревки вдвое дальше, чтобы поднять вес на такое же расстояние.
Четыре колеса
Хорошо, а что, если вы воспользуетесь четырьмя колесами, скрепленными длинной веревкой, которая
петли над ними, как на картинке ниже? Вы можете видеть, что 100 кг
масса (1000 ньютон) теперь висит на четырех секциях веревки (те, что слева,
игнорируя свободный конец веревки, за которую вы тянете).Это означает
каждая секция веревки выдерживает четверть общего веса в 1000 ньютонов, или 250 ньютонов,
а чтобы поднять гирю в воздух, нужно тянуть только
четверть силы — тоже 250 ньютонов. Чтобы вес увеличился на 1 м, необходимо укоротить каждую
сечение веревки на 1 м, поэтому свободный конец веревки нужно потянуть на 4 метра. Мы говорим, что шкив с четырьмя колесами и веревка, намотанная таким образом, дает механическое преимущество в четыре, что вдвое лучше, чем шкив с двумя веревками и колесами.
Иллюстрация: Как работают шкивы №3: С четырьмя колесами и канатом, работающим на четыре секции, шкив снижает необходимую вам подъемную силу на четверть. Но вы должны протянуть конец веревки в четыре раза дальше.
Рекламные ссылки
Как шкив похож на рычаг
Вероятно, вы видите, что шкив увеличивает силу так же, как качели, которые являются своего рода рычагом. Если вы хотите поднять кого-то в четыре раза тяжелее вас на качелях, вам нужно сесть в четыре раза дальше от точки равновесия (точки опоры), чем они.Если вы переместите конец рычага вниз на 4 см, их конец качелей переместится вверх только на 1 см. Когда они поднимаются, они получают определенное количество потенциальной энергии, равное их весу, умноженному на расстояние, на которое они перемещаются. Вы теряете ровно столько же энергии — равное вашему весу (в четыре раза меньше), умноженному на расстояние, на которое вы перемещаетесь (в четыре раза больше). Вы можете перенести их гораздо больший вес, потому что вы перемещаете свой конец качелей на гораздо большее расстояние: рычаг качелей позволяет создавать больше силы, работая на большем расстоянии.
То же самое происходит и со шкивом, за исключением того, что вы тянете за веревку вместо того, чтобы двигать конец качели. Чтобы поднять что-то в четыре раза тяжелее, вы можете использовать ту же силу, но только если вы потянете веревку в четыре раза дальше. Если вы посмотрите на то, что происходит с обеих сторон шкива, и умножите силу на пройденное расстояние, вы обнаружите, что это то же самое. Со своей стороны вы используете небольшую силу на большом расстоянии. С другой стороны, вес намного больше, но он перемещается на меньшее расстояние.
Рисунок: Как шкив работает как рычаг: Как и в случае с рычагом, шкив может «волшебным образом» создать больше силы, но только если вы примените эту силу на большем расстоянии. Это почему? Читайте ниже!
В чем прикол?
Шкивы звучат великолепно — и они есть. Но обязательно должен быть
ловить? Если вы можете поднять 100 кг (1000 ньютонов), потянув с силой, эквивалентной
всего 25 кг (250 ньютонов), конечно, вы делаете только четверть меньше работы и используете
всего на четверть меньше энергии? И если это правда, вы могли бы построить
какой-то шкив, который на самом деле будет производить для вас энергию: положите
всего в одной единице энергии и получите четыре единицы! Звучит великолепно!
Фото: есть ли скрытый зацеп при использовании шкива? Почему бы не сделать простой шкив из конструктора (или просто самодельных материалов, таких как хлопковые катушки и веревка) и проверить его на себе.Нет лучше
способ понять, как работают шкивы. С таким простым шкивом для двух колес легко понять, что вам нужно
потяните тетиву дважды, пока вес поднимается вверх.
К сожалению, такие удивительные вещи категорически запрещены.
по закону физики, называемому сохранением энергии, который
говорит, что вы всегда должны вкладывать столько энергии, сколько выходите. Итак, начнем
подумайте о шкивах с точки зрения энергии. Если вы поднимете вес
100 кг (1000 ньютонов) на расстоянии 1 метра от земли, вы должны сделать то же самое
объем работы, независимо от того, используете ли вы шкив или нет: вы должны переместить
та же сила на том же расстоянии.Если вы используете шкив и уменьшите
силу, которую вы используете на четверть, вам все равно нужно сделать то же количество
работы. Просто нужно дергать за конец веревки четыре
раза больше, чтобы каждая из четырех опорных секций каната поднялась на
То же количество. Это загвоздка со шкивом. Вы тянете с меньшим
силы, но нужно тянуть дальше (и, вообще говоря, использовать
сила дольше). Не тратя меньше энергии на шкив, вы
на самом деле приходится использовать немного больше из-за трения, где
трос трется о колеса шкива.Но кажется и чувствует
шкив проще использовать, а это главное!
Фото: Шкив оборудования. 1) Эти маленькие ролики имеют крючки, поэтому их легко подвесить к потолку. Обратите внимание на то, что на колесах есть канавки, чтобы веревка не соскальзывала с них. Фото Паулы Арагон. 2) Гигантские шкивы на рычаге большого железнодорожного крана. Здесь используется огромный прочный трос.
Что такое блок и подкат?
В технике шкив, который я здесь описывал, иногда называют блоком и захватом : колеса и их крепления — это блоки, а веревки, которые обвивают их, — это снасти.В моих примерах один блок закреплен вверху, а другой блок перемещается вверх вместе с грузом. В более общем плане для инженеров шкив — это колесо, на которое вы натягиваете веревку или ремень для соединения одной части машины с другой, будь то подъем предметов, передача энергии или выполнение чего-либо еще. Однако в простой науке мы склонны использовать «шкив» только для обозначения связки колес и канатов для подъема.
Фото: два типа шкивов. Слева: блок и снасть — это система на основе шкивов для подъема вещей, сделанная из блоков (секций колеса) и соединяющих их между собой.Он использовался для подъема ракетного оборудования в Центре космических полетов им. Маршалла НАСА. Фото Джеймса У. Розенталя, журнал «Исторический американский технический отчет», любезно предоставлено Библиотекой Конгресса США.
Справа: колеса шкива также можно использовать для соединения различных частей машины. Здесь колесо шкива на большом двигателе приводит в движение другое колесо шкива на машине, находящейся на некотором расстоянии. В этом случае шкивы просто передают мощность. Фото: Исторический американский технический отчет, любезно предоставлено Библиотекой Конгресса США.
Рекламные ссылки
Узнать больше
На сайте
На других сайтах
- Шкивы, блоки и другие снасти: отличная коллекция фотографий шкивов, собранная пользователем Flickr «Элси» (Лес Чатфилд), у которого отличный глаз.
для детализации и раскрытия скрытой красоты механического мира.
Книги
Для младших читателей
Почему-то существует множество книг о шкивах для юных читателей (возрастная группа 6–10).Вот лишь некоторые из них, с которых можно начать:
- «Рычаги и шкивы». Автор Alex Brinded, Kidhaven / Greenwood, 2019. Простое введение для очень маленьких читателей, которое является частью базовой инженерной серии под названием «Заставить вещи работать». Текст написан четко, хотя фотографии и дизайн немного устарели. Возраст 6–9.
- Exploring Science: Machines: Chris Oxlade, Anness, 2016. Практическое введение в шестерни, рычаги, шкивы и двигатели с помощью 20 простых экспериментов. Эта книга помогает представить шкивы в более широком контексте простых машин.Возраст 8–10.
- Изготовление машин со шкивами: Крис Окслейд, Raintree / Capstone, 2015. Еще одно очень практичное 32-страничное введение, которое логически ведет нас через простые шкивы, составные шкивы, исторические машины, ремни и многое другое. Есть полезные дополнения к школьной библиотеке, в том числе забавные факты и глоссарий. Возраст 7–9.
- Как работают шкивы: Джим Меццанотт. Гарет Стивенс, 2007. 24-страничное руководство, которое знакомит с шкивами и показывает, как мы используем их в повседневной жизни.Акцент здесь делается на шкивах как на средстве использования силы в наших интересах.
- Что такое шкивы ?: Хелен Фрост, Capstone Press, 2001. Очень простое иллюстрированное введение для младших читателей (возраст 7–10, я полагаю).
Эти две книги более общего характера, которые рассматривают науку о силе в более широком контексте:
- «Можете ли вы почувствовать силу» Ричарда Хаммонда. Дорлинг Киндерсли, 2006/2015. Веселая книга о силах и физике для младших читателей. (Я был одним из консультантов и авторов этой книги.)
- Сила и движение Питера Лафферти. Дорлинг Киндерсли, 2000. Классическая книга очевидцев DK, охватывающая историю науки, а также современные технологии. Устаревший, но все же полезный.
Для читателей постарше
- Принципы машиностроения, Джон Берд и Карл Росс, 2017. Подробное (288 страниц) введение в общую науку и принципы машиностроения.
- Трактат о ремнях и шкивах Джона Ховарда Кромвеля, 1903 г.Классическая книга из более раннего возраста! Объясняет теорию шкивов (с математикой) и много иллюстраций. Доступен в различных форматах электронных книг.
Видео
- Как работают шкивы: простое введение Чарли Марца. К сожалению, он использует имперские (американские) единицы футов и фунтов, но идею вы поняли. Если вы европеец, вы можете мысленно подставить метры и килограммы.
- Как работают шкивы: более длинное и сложное введение из Академии Хана.Это объяснено ясно и очень хорошо, но страдает от рисования каракулей мышью и смешивания единиц измерения (ньютонов, футов, метров).
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2009, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитировать эту страницу
Вудфорд, Крис. (2009/2020) Шкивы. Получено с https://www.explainthatstuff.com/pulleys.html. [Доступ (укажите дату здесь)]
Подробнее на нашем сайте…
.